
東大塾長の山田です。
このページでは、ローレンツ力について詳しく説明しています。
ローレンツ力について大きさや向きについてしっかりと議論した後、その性質を確認し、荷電粒子の運動を考えることで、体系的な理解が可能になっています。
ぜひ勉強の参考にしてください!
1. ローレンツ力の定義
1.1 電磁場の定義とローレンツ力
電場が\(\vec{E}\)、磁束密度が\(\vec{B}\)の電磁場中の点Pについて考えてみましょう。この点Pにやがてやってくる電気量\(q\)、速度\(\vec{v}\)の粒子は、以下のような電磁力\(\vec{F}\)を受けます。
\[\vec{F}=q\left(\vec{E}+\vec{v}\times\vec{B}\right)\]
ここで、\(\vec{E}=0\)のときの\(\vec{F}\)を考えてみましょう。このときの\(\vec{F}\)を\(\vec{F_L}\)とすると、
\[\vec{F_L}=q\vec{v}\times\vec{B}\]
と書くことができます。このときの\(\vec{F_L}\)を「ローレンツ力」といいます。
これは
\[\displaystyle\frac{\vec{F_L}}{q}=\vec{v}\times\vec{B}\]
と変形することができ、一つのベクトルで大きさと向きを持ちます。これについて以下で考えていきましょう!
1.2 大きさ
ローレンツ力の大きさ\(q\left|\vec{v}\times\vec{B}\right|\)について考えていきましょう。ローレンツ力の大きさは以下のように書き下すことができます。
ここでの\(\theta\)は\(\vec{v}\)と\(\vec{B}\)のなす角で、
\[0≦\theta≦\pi\]
これより、\(\sin\theta=0⇔\theta=0, \pi\)のときは、\(|\vec{v}\times\vec{B}|=0\)でつまり以下のことが成り立つことが分かる。
速度の向きと、磁場の向きが平行の場合、ローレンツ力は働かない。
もし実際に力の大きさを計算することが求められたときは、\(\vec{B}\)(もしくは\(\vec{v}\))を\(\vec{v}\)(\(\vec{B}\))に垂直な成分と平行な成分に分解して、垂直な成分のみを考慮してあげればよいことが分かります。
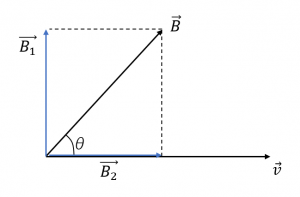
例えば上図の\(\vec{v}\)と\(\vec{B}\)によるローレンツ力の大きさは、速度成分に垂直な磁場成分を考えればよいから
\[\left|F_L\right|=q\left|\vec{v}\right|\left|\vec{B_1}\right|\]
と書き下すことができます。\(B_1=B\sin\theta\)も考えてあげると、力の大きさの公式がすっと理解できますね。
1.3 向き
次に向きについて考えていきましょう。
\(\vec{v}\)と\(\vec{B}\)が平行でないとき、向きは以下のようになります。
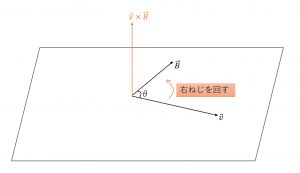
注1:\(q<0\)のときは、\(\vec{v}\times\vec{B}\)と\(\vec{F_L}\)はそれぞれ逆になります。
注2:\(\vec{v}\times\vec{B}\)を\(\vec{v}\)と\(\vec{B}\)の外積といいます。ただ、高校物理において実際に外積計算をさせることはなく、1.2のように必要な成分に分解することで計算することがほとんどです。
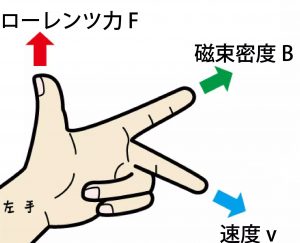
注3:外積の意味を考慮してローレンツ力の向きを右ねじ方向と定義しましたが、フレミング左手の法則を用いられることも多いです。使いやすい方を用いると良いでしょう。
2. ローレンツ力の性質
ローレンツ力についての基本的な知識が頭に入ったところで、次は性質についてみていきましょう。性質といっても先ほどの説明からわかることです。
2.1 \(\vec{F_L}⊥\vec{v}\)である
よって微小変位の向きを\(\vec{v}\)でとったとき、
\[\vec{F_L}\cdot\vec{v}=0\]
であり、ローレンツ力は仕事をしません。
よって、ローレンツ力のみを受ける運動を考えるとき、物体が仕事を受けないことから\(\displaystyle\frac{1}{2}m|\vec{v}|^2\)は一定となり、それより速さ\(|\vec{v}|\)は一定となることが分かります!
あくまでも速さ\(|\vec{v}|\)が一定であることに留意しましょう。\(\vec{F_L}⊥\vec{v}\)ゆえ、\(\vec{v}\)(速度の向き)自体は変化します。(つまり軌道が曲がるということ)
2.2 \(\vec{F_L}⊥\vec{B}\)である
つまり、ローレンツ力は\(\vec{B}\)方向に成分を持ちません。これより磁場中の電荷の運動について以下のように考えればよいことが分かります。
磁場中の電荷の運動
⇒\(\vec{B}\)方向の成分と\(\vec{B}\)に垂直な面内の成分に分けて追跡すると良い。
これは円運動を追跡するときとまったく同じ状況です。円運動についてもなぜそうなるのかチェックしておくと良いでしょう。
3. 磁場中の荷電粒子の運動
今まで学んできたことを生かして、磁場中の荷電し粒子の運動について考えてみましょう。ここでは、以下のような磁場を考えます。
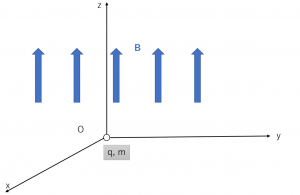
z軸正の向きに磁束密度\(B\)の一様電場が空間全体にかかっているとします。この磁場の中に、質量\(m\)で電荷\(q\)(\(q>0\))の荷電粒子を原点Oからyz平面でy軸から角度\(\theta\)の向きに速さ\(v\)で打ち込む場合を考えていきます。(下図参照)
ただし以下では、重力の影響は一切無視できるとします。
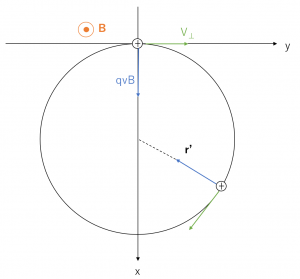
3.1 磁場に対して垂直に入射した場合(\(\theta=0\))
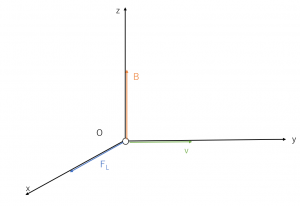
速度、磁場、ローレンツ力の向きは上図のようになります。このとき、ローレンツ力の大きさ\(|\vec{F_L}|\)は、
\[|\vec{F_L}|=|q\vec{v}\times\vec{B}|\] \[\qquad =q|\vec{v}||\vec{B}|\sin\displaystyle\frac{\pi}{2}\] \[\qquad =qvb\]
定石通り「\(\vec{B}\)方向(z成分)」と「\(\vec{B}\)に垂直な面内(xy平面)」に分けて考えていきましょう!
\(\vec{B}\)方向(z成分)
運動方程式より、
\[m\displaystyle\frac{d^2 z}{dt^2}=0\quad (∴\displaystyle\frac{d^2 z}{dt^2}=0)\]
\(t=0\)で、\(z=0, v_z=0\)だから、運動方程式を満たす解は、
\[z(t)=0\]
\(\vec{B}\)に垂直な面内(xy平面)
荷電粒子には下図のように中心力のみが働き、ローレンツ力は仕事をしないため等速円運動をします。
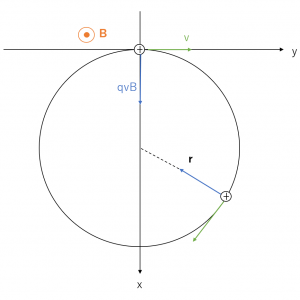
このとき、中心方向の運動方程式は
\[m\displaystyle\frac{v^2}{r}=qvB\]
これを解くと、
\[r=\displaystyle\frac{mv}{qB}\]
となるから、この円運動の中心点が
\[(x_0, y_0, z_0)=(\displaystyle\frac{mv}{qB}, 0, 0)\]
となることが分かります。これにより、荷電粒子がxy平面に描く軌跡は、
\[\left(x-\displaystyle\frac{mv}{qB}\right)^2+y^2=\left(\displaystyle\frac{mv}{qB}\right)^2\]
また、この等速円運動の周期\(T\)は
\[T=\displaystyle\frac{2\pi r}{v}\] \[\quad =2\pi\displaystyle\frac{m}{qB}\]
となります。
ただ計算して周期や半径を求めただけでは面白くないので、結果から何が分かるか考えてみましょう。
先ほど
\[r=\displaystyle\frac{mv}{qB}, T=2\pi\displaystyle\frac{m}{qB}\]
が求まり、これから
\[r∝m, T∝m\]
が分かります。これは「質量が大きいほど速度が変化しにくい→軌道が曲がりづらい(速度が変化しにくい)」という質量の意味の表れに他なりません。
また、\(r∝v\)であり、速度が大きいほど遠回りする、さらにその結果として\(T\)が\(v\)に依らないということもわかります。(⇔周期は初期条件に依らない)
さらに、
\[r∝\displaystyle\frac{1}{qB}, T∝\displaystyle\frac{1}{qB}\]
であり、磁場と電荷の「結合」が大きいほど\(r,T\)が小さくなることが分かります。特に、\(qB→0\)のとき、\(r→∞\)となる(直線になる)ことが分かります。
3.2 磁場に対して平行に入射した場合(\(\theta=\displaystyle\frac{\pi}{2}\))
次に、z軸正の向きに打ち出したときを考えてみましょう、
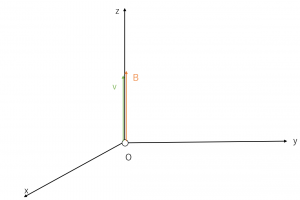
この場合、\(\vec{v}//\vec{B}\)より、\(\vec{F_L}=0\)となります。よってこの場合は等速直線運動となります。
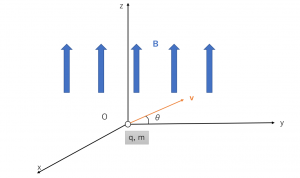
3.3 磁場に対して斜めに入射した場合(\(0<\theta<\displaystyle\frac{\pi}{2}\))
最後にy軸との角度\(\theta\)(\(0<\theta<\displaystyle\frac{\pi}{2}\))の向きに打ち出した場合について考えてみましょう。このとき、速度の磁場に垂直な成分と平行な成分をそれぞれ\(v_{⊥}, v_{\parallel}\)とします。
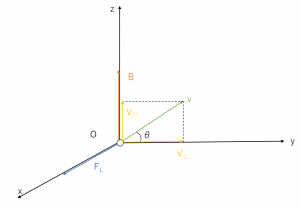
まずはローレンツ力の大きさを求めましょう。ローレンツ力の大きさを求めるためには、速度の磁場と垂直な成分を考慮すれば十分なので、その成分を\(v_{⊥}\)とすると、\(v_{⊥}=v\cos\theta\)であり、ローレンツ力の大きさは
\[|\vec{F_L}|=qv_{⊥}B=q\left(v\cos\theta\right)B\]
と書き下すことができます。それでは、また定石通り「\(\vec{B}\)方向(z成分)」と「\(\vec{B}\)に垂直な面内(xy平面)」に分けて考えていきましょう!
\(\vec{B}\)方向(z成分)
運動方程式より、
\[m\displaystyle\frac{d^2 z}{dt^2}=0\]
\(t=0\)で、\(z=0, v_z=v_{\parallel}=v\sin\theta\)だから、運動方程式を満たす解は、
\[z(t)=v_{\parallel}t=v\sin\theta\cdot t\]
となります。
\(\vec{B}\)に垂直な面内(xy平面)
荷電粒子には中心力としてローレンツ力のみが働き、等速円運動となります。
この等速円運動の半径\(r’\)は3.1の\(r\)で\(v\)を\(v_{⊥}\)に変えてあげればよく、
\[r’=\displaystyle\frac{mv_{⊥}}{qB}=\displaystyle\frac{mv\cos\theta}{qB}\]
となり、周期は
\[\displaystyle\frac{2\pi r’}{v_{⊥}}=2\pi\displaystyle\frac{m}{qB}=T\]
となり先ほどと変わらないということが分かります。
さて全体としてはどのような運動になるでしょうか。
z方向に等速度運動をつづけながらxy平面で等速円運動を行っていることを考えると、下図のような\(B\)に巻き付く「らせん運動」になることが分かります!
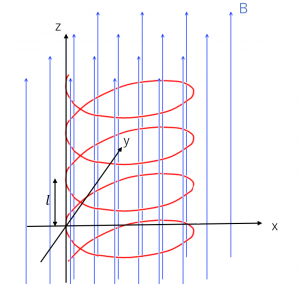
ここで図中の\(l\)を求めてみましょう。\(l\)は荷電粒子が一周する間にz軸方向に進んだ距離のことです。xy平面の円運動の周期は\(T\)で、速度のz成分は\(v\sin\theta\)のまま一定なので、
\[l=v\sin\theta\cdot T=2\pi\displaystyle\frac{mv\sin\theta}{qB}\]
となります。この議論は流れを問われやすいのでしっかりと頭に入れておきましょう。
4. まとめ
お疲れ様でした。最後に今回学んだことをまとめておくので、復習に役立ててください!
ローレンツ力の定義:\(\vec{F_L}=q\vec{v}\times\vec{B}\)
大きさ:\(\left|F_L\right|=q\left|\vec{v}\right|\left|\vec{B}\right|\sin\theta\)
向き:\(\vec{v}\)と\(\vec{B}\)を含む面に垂直で、\(\vec{v}\)から\(\vec{B}\)に右ねじを回してねじの進む向き
ただし、\(q<0\)の場合は向きは逆になる。
式からわかること、、
①速度の向きと、磁場の向きが平行の場合、ローレンツ力は働かない。
②\(\vec{F_L}⊥\vec{v}\)である。
③\(\vec{F_L}⊥\vec{B}\)である。
磁場中の電荷の運動について
⇒\(\vec{B}\)方向の成分と\(\vec{B}\)に垂直な面内の成分に分けて追跡すると良い。