東大塾長の山田です。
このページでは、入試に頻出の位置エネルギーについて詳しく説明しています。それぞれについてしっかりとした説明と導出を載せているので、丸暗記に頼らない理解をすることが可能です。
ぜひ勉強の参考にしてください。運動エネルギーやエネルギー保存則についての知識がある方が、しっかりとした理解につながるので、下に貼ってあるの記事もぜひご覧ください!
1. 位置エネルギーについて
1.1 エネルギーとは?(単位についても説明)
まずはエネルギーについてのイメージをしっかりとつけましょう。
ゴルフドライバーでボールを打つと遠くへ飛ばすことができたり、ばねを引き延ばしたときに他の物体に仕事をすることができます。このようにある物体が他の物体に仕事をする能力を持っているとき、その物体はエネルギーを持っている、といいます。
つまりエネルギーとは、仕事をする能力のことです。
エネルギーの単位は、仕事の単位と同じであるジュール\([J]\)を用います。
1.2 位置エネルギー(ポテンシャルエネルギー)について
位置エネルギーについて説明します。位置エネルギーはポテンシャルエネルギーとも呼ばれています。
位置エネルギーとは、物体がある位置(「高さ」や「ばねの伸び」など)にあることで物体に蓄えられるエネルギーのことです。ある位置にあることで、仕事をしうる能力を潜在的に持つことから、この潜在能力を位置エネルギー(ポテンシャルエネルギー)と呼ぶのです。
位置エネルギーは場面ごとに違う言い方をされることが多く、ばね運動においては「弾性エネルギー」と呼ばれることが多いです。呼び方が異なっても本質的には同じものを扱っているという意識を持っておきましょう!
この段階で言葉のみで意味が分かれば十分ですが、そうでない人も多いと思うので、以下に示す式による説明や、具体例などを参考にしてイメージを築き上げていってください!
1.3 式による位置エネルギーの説明
まずは式で説明してみます。その前に以下の概念を導入しておく必要があります。
保存力:仕事が経路によらない力(例:地表付近の重力、弾性力、万有引力、クーロン力)
非保存力:仕事が経路によって異なる力(例:摩擦力、ローレンツ力)
保存力は位置エネルギーを持つ力と言い換えることもでき、力学的エネルギー保存則は保存力が関係している運動の時のみ成り立ちます。
今回は、保存力のみについて扱います。
保存力\(F\)に対して、それらに逆らって外力\(F_{外}=-F\)を加えて物体をゆっくり運ぶ仕事について考えてみましょう。

このときその外力のする仕事\(W_{外}\)は始点\(r_0\)と終点\(r\)のみによって決まり(∵\(F\)が保存力)、以下の式で表すことができます。
\[W_外=\int_{r_0}^{r} F_{外}dr=-\int_{r_0}^{r}Fdr\]
ゆっくりと動かした場合、物体は各瞬間釣り合っていて運動エネルギーは全く増えないので、外力のした仕事がそのままエネルギー\(U(r)\)として蓄えられたと解釈できます。
そして上で説明した通り、この\(U(r)\)が位置エネルギーとなります。\(r_0=0\)の取り方はどのような運動を扱うかによって異なってきます。これについては実際に位置エネルギーの導出を行うことで実感しましょう!
2. 様々な位置エネルギー
それでは実際に「どの公式を覚えればよいのか」、「どのように1.3の考え方を適用するのか」を見ていきましょう。
2.1 必ず覚えておくべき位置エネルギー
大学入試において覚える必要のある位置エネルギーの公式は4つあります。
地表付近の重力による位置エネルギー:\(U=mgh\)
\(m\):物体の質量、\(g\):重力加速度、\(h\):基準からの変位
質点間の万有引力による位置エネルギー:\(U=-G\displaystyle\frac{Mm}{r}\)
\(G\):万有引力定数、\(M\),\(m\):各質点の質量、\(r\):質点間距離
ただし無限遠を基準としている
ばねの弾性力による位置エネルギー:\(U=\displaystyle\frac{1}{2}kx^2\)
\(k\):ばね定数、\(x\):自然長からの変位
点電荷間のクーロン力による位置エネルギー:\(U=k\displaystyle\frac{Qq}{r}\)
\(k\):比例定数(\(=\displaystyle\frac{1}{4πε_0}\))、\(Q\),\(q\):電荷、\(r\):点同士の距離
ただし無限遠を基準としている
これらの式は入試までに必ず覚えて使いこなせるようになる必要があります。しかし、どうしても覚えづらい点はあるので、導出することでなるべく丸暗記に頼らないようにしましょう!
2.2 各位置エネルギーの導出
それでは各力における位置エネルギーの導出を行いましょう!
導出するにあたって用いる式は
のみです。この式をもとに一つ一つ導出していきましょう。上の式はどちらを使っても良いですが、\(\displaystyle\int_{r_0}^{r} F_{外}dr\)の方が外力のした仕事をイメージしやすいので、今回はそちらを用います。
2.2.1 重力(地表付近)
鉛直上向きに\(y\)軸を取ったときについて考えます。\(y=0\)を基準に取り\(y=h\)における位置エネルギーを考えます。
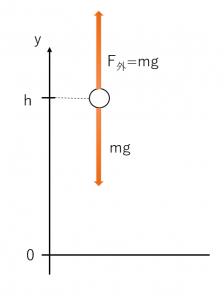
このとき、位置エネルギー\(U(h)\)は以下のように導出できます。
2.2.2 質点間の万有引力
二質点間の距離が\(r\)のときの、質量\(M\)と\(m\)の質点間にかかる万有引力について考えます。また、万有引力の位置エネルギーを考える際には、基準点\(r_0\)を無限遠にとります。
今回の場合で無限遠を基準にするときは、質量\(M\)の質点を距離無限遠のところから距離\(r\)のところにもってきたとイメージしましょう。計算における力の向きは\(M\)の質点を基準にしています。
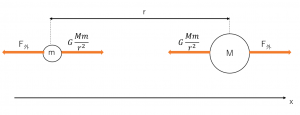
このとき位置エネルギーは以下のように導出できます。
「エネルギーがマイナス?」と感じた人もいるでしょう。
これは基準を無限遠にとったために起こったことです。エネルギーはあくまでもその値そのものに意味があるわけではなく、その差・互換性に意味があるということを頭に入れておきましょう!
2.2.3 ばねの弾性力
ばね定数\(k\)のばねに物体をつないで自然長から\(x\)だけ変位させた時の位置エネルギー(弾性エネルギー)について考えます。基準点を自然長の位置に取るのが普通です。
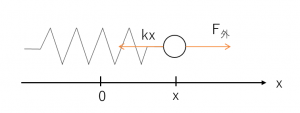
このとき弾性エネルギー\(U(x)\)は以下のように導出できます。
2.2.4 点電荷間のクーロン力
距離rだけ離れたそれぞれの電荷が\(Q\),\(q\)の点電荷間に働くクーロン力による位置エネルギーを考えます。クーロン力による位置エネルギーを考える際には、基準点\(r_0\)を無限遠にとります。また、今回は簡易のため、\(Qq>0\)のとき、つまり\(Q\)と\(q\)が同符号の時について考えます。
今回の場合でも万有引力同様に、無限遠を基準にするときは、電荷\(Q\)の点を距離無限遠のところから距離\(r\)のところにもってきたとイメージしましょう。計算における力の向きは電荷\(Q\)の点を基準にしています。
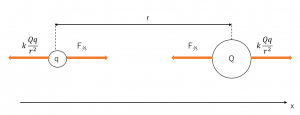
このときの位置エネルギー\(U(r)\)は以下のように導出できます。
3. 位置エネルギーと運動エネルギーの関係
次に運動エネルギーと位置エネルギーの関係について整理しましょう!
運動エネルギーについてはこちらから(ほとんど同内容が載っています)
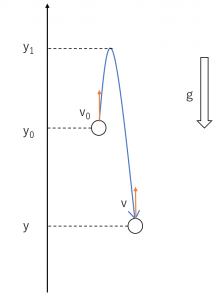
簡易のため、今回は重力の下での鉛直運動を考えます。
下図のように鉛直上向きに\(y\)軸を取り、\(y=y_0\)から初速\(v_0\)で投げ上げられた小球が、任意の高さ\(y\)で速度\(v\)を持つとします。
この場合小球にかかる力は重力\(-mg\)のみで、上のセクションで導出した運動エネルギーと仕事の関係、
\[\displaystyle\frac{1}{2}mv_{2}^2-\displaystyle\frac{1}{2}mv_{1}^2=F(x_2-x_1)\]
に、\(F=-mg\)と位置・速度についての各値を代入すると、
\[\frac { 1 } { 2 } m v ^ { 2 } – \frac { 1 } { 2 } m v _ { 0 } ^ { 2 } = – m g( y – y_0 )\] \[∴\frac { 1 } { 2 } m v ^ { 2 } + m g y = \frac { 1 } { 2 } m v _ { 0 } ^ { 2 } + mgy _ { 0 }\cdots①\]
が得られます。
また、物体の到達する最高点を\(y_1\)とすると、その点では\(v=0\)であるから、①式に\(v=0\)を代入して
\[\frac{1}{2}mv_{0}^2=mg(y_1-y_0)\cdots②\]
とすることができます。
これは、ある高さ(今回の場合は\(y_1-y_0\))に存在することによって、運動エネルギーを生み出す潜在能力(ポテンシャル)をもつ、という位置エネルギー(ポテンシャルエネルギー)の性質を表しています。
つまり、①式によって「運動エネルギーと位置エネルギーの和は常に等しい」というエネルギー保存則が、②式によって、運動エネルギーと位置エネルギーの互換性が示されていることが分かります。
このように運動エネルギーと位置エネルギーの間には深い関係があることが分かったと思います!
4. 位置エネルギーまとめ
それでは今回扱った事項についてもう一度整理してみましょう!
保存力(外力)の仕事とエネルギーの関係: \(\int_{r_0}^{r} F_{外}dr=-\int_{r_0}^{r}Fdr=U(r)\)
地表付近の重力による位置エネルギー:\(U=mgh\)
\(m\):物体の質量、\(g\):重力加速度、\(h\):基準からの変位
質点間の万有引力による位置エネルギー:\(U=-G\displaystyle\frac{Mm}{r}\)
\(G\):万有引力定数、\(M\),\(m\):各質点の質量、\(r\):質点間距離
ただし無限遠を基準としている
ばねの弾性力による位置エネルギー:\(U=\displaystyle\frac{1}{2}kx^2\)
\(k\):ばね定数、\(x\):自然長からの変位
点電荷間のクーロン力による位置エネルギー:\(U=k\displaystyle\frac{Qq}{r}\)
\(k\):比例定数(\(=\displaystyle\frac{1}{4πε_0}\))、\(Q\),\(q\):電荷、\(r\):点同士の距離
ただし無限遠を基準としている
エネルギー保存則:運動エネルギーと位置エネルギーの和は等しい
以上です。お疲れさまでした!


本の著者並に 方程式を書き表せる人種ってのは、いるのかな?