東大塾長の山田です。
このページでは、「単振動の性質」について説明したあと、「変位・速度・加速度の導出」を行った後、「エネルギー保存則の導出・特徴」にまとめています。
ぜひ勉強の参考にしてください!
円運動について理解していると単振動の理解も深まると思いますので、そちらの記事もぜひ参考にしてください。
また、単振り子の単振動については別記事で扱っていますのでそちらもご覧ください。
1. 単振動について
1.1 単振動の定義
そもそも単振動とはどのような運動でしょうか?
すぐに考えつくような例では、ばねを引っ張って話すと伸び縮みを繰り返す運動や、振り子を揺らしたときにゆらゆらと揺れ続けるような運動のことを、単振動といいます。
これを言葉で一般化すると以下のような定義が得られます。
上の定義について詳しく見ていきましょう。まず等速円運動を直径上に投影するとは以下の図のようなことを言います。
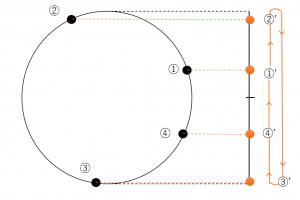
例えば①→②→③→④の順で反時計回りに等速円運動をしている物体があるとして、このとき直径上に投影した運動は①’→②’→③’→④’のようになります。
オレンジ線が、投影されたときの物体の運動の軌跡となります(実際は同一直線上)。
このように等速円運動する物体の射影は、ばねの先に着けたおもりのように直線上の往復運動になります。これが単振動と呼ばれる運動の正体です。
1.2 単振動の運動方程式(ばね)
ばねのようにフックの法則が成り立つ物体では、単振動起こることが知られています。このとき、単振動はどのような運動方程式で表記できるでしょうか?
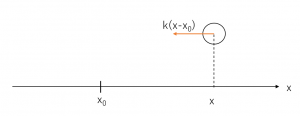
ばねのようにフックの法則にしたがう、平衡点からの変位に比例した復元力がかかる物体の運動について考えてみましょう。今回は一次元で考えることにします。
質量が\(m\)、位置が\(x\)の物体が受ける復元力\(F\)を\(F=-k(x-x_0)\)で定義します。ただし、\(k\)は比例定数で、\(x_0\)は平衡点(\(F=0\)なる点)です。

このときの運動方程式は
\( \displaystyle m \frac{d^2 x}{dt^2} = – k (x-x_0) \cdots ① \)
となります。このような運動方程式で運動が記述できるとき、物体は単振動を行っているということができます。
①式を整理していくと
\( \displaystyle \frac{d^2 x}{dt^2} = – \frac{k}{m} (x-x_0) \)
ここで \( \omega=\sqrt{\displaystyle\frac{k}{m}} \) とすると
\( \displaystyle \frac{d^2 x}{dt^2} = – \omega^2 (x-x_0) \cdots ② \)
という式を得ることができます。
このとき①式や②式のことを「単振動の運動方程式」といいます。
また、物体が単振動するとき、平衡点\(x_0\)のことを「振動中心」といいます。
\( \begin{cases}
\displaystyle m \frac{d^2 x}{dt^2} = – k (x-x_0) \\
\frac{d^2 x}{dt^2} = – \omega^2 (x-x_0)
\end{cases}
\)
*1 二つの式は同義である。
*2 \(\omega=\sqrt{\displaystyle\frac{k}{m}}\)
上で \( \omega \) を \( \omega = \sqrt{\displaystyle \frac{k}{m}} \) で定義しましたが、このときこの \( \omega \) のことを「角振動数」といいます。
これは、名前こそ違うものの、円運動における角速度\(\omega\)と同じ量であり、円運動同様、振動周期(振動が一往復するのにかかる時間)を \( T \) [s]、角振動数を \( \omega \) とすると、以下の関係が成り立ちます。
\( \displaystyle 2 \pi=\omega T \)
2. 変位・速度・加速度(丸暗記の必要なし!)
運動方程式について分かったところで次はその運動を追跡していきましょう!
この部分は単振動を学ぶにおいて多くの人がつまずく箇所です。というのもほとんどの教科書。参考書では「変位・速度・加速度の式」がすべて丸暗記すべき事項として扱われているからです。
今回は丸すべて丸暗記せずともしっかりと理解できるように説明していきます。
また、以下では数3の知識が必要になりますので、知識に不安がある方はこちらも参考にしてください。
2.1 変位(周期・振幅)
それではまず変位についてです。先ほどと同じモデルで考えてみましょう。
単振動の運動方程式
\( \displaystyle m \frac{d^2 x}{dt^2} = – k (x-x_0) \)
\( ⇔ \displaystyle \frac{d^2 x}{dt^2} = – \omega^2 (x-x_0) \)
(ただし\(\omega=\sqrt{\displaystyle\frac{k}{m}}\))
が与えられたとき、単振動する物体の平衡点からの変位 \( x-x_0 \) は定数 \( A \)、\( \alpha \) を用いて
\( \begin{cases}
\displaystyle x-x_0 = A \sin(\omega t+\alpha) \\
または\\
\displaystyle x-x_0 = A \cos (\omega t+\alpha ‘)
\end{cases} \)
*1 \(\alpha ‘=\alpha +\displaystyle\frac{\pi}{2}\)
*2 式による運動法手式の一般解の導出はこちらの記事
と書くことができます。
\(\alpha\)は初期条件により決まる定数です。
上の微分方程式を解くことでも変位は導出できますが、下図のイメージを持っているのもいいかもしれません。(下の場合、\(\alpha=0\))
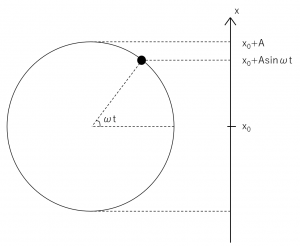
関数をsin型かcos型のどちらで表すかは問題の状況によって変わりますが、以降では①式のsin型を例に考えていくことにします。
①式を見てみると、\( -1 ≦ \sin (\omega t+\alpha) ≦ 1 \) より、変位 \( x-x_0= \) に関して
\( \displaystyle -A ≦ x-x_0 ≦ A \)
が成立します。
つまり物体が平衡点から幅\(A\)の範囲内で運動をしているということが分かります。
この \( A \) が「振幅」となります。
振動周期に関してですが、sin型、cos型のどちらで書くにしても周期\(2π\)の周期関数なので、その中の \( \omega t \) が \( 2 \pi \) に変わる時間が振動周期であり、以下のように求めることができます。
周期を \(T\) とすると
\( \displaystyle \omega T = 2 \pi \)
\( \displaystyle ∴ T = \frac{2π}{\omega} = 2 \pi \sqrt{\frac{m}{k}} \)
周期の式も最初から丸覚えするのではなく、何回も導出していくうちに覚えている状態にしていきましょう!
2.2 速度・加速度
変位について分かったところで次は速度・加速度です。
この二つに関しては変位さえ分かっていれば簡単に求めることができます。というのも速度 \( v \)、加速度 \( a \) は変位 \( x \) を用いてそれぞれ
\( \begin{cases}
\displaystyle 速度:v = \frac{dx}{dt} \\
\displaystyle 加速度:a = \frac{d^2 x}{dt^2}
\end{cases} \)
と表すことができるからです。
振動の平衡点からの変位が変位が \( x-x_0 = A \sin (\omega t+\alpha) \) で表せるとき、速度 \( v \)、加速度 \( a \) は以下のように表すことができます。
\( \begin{cases}
\displaystyle 速度:v = \frac{dx}{dt} = A \omega \cos(\omega t+\alpha) \\
\displaystyle 加速度:a = \frac{d^2 x}{dt^2} = – A \omega^2 \sin(\omega t+\alpha) ≡ – \omega^2 x
\end{cases} \)
このように簡単に導出できるので、いちいち式を丸暗記する必要はありません。
ぜひこのやり方を覚えておきましょう!
3. エネルギー保存則
続いては単振動を行う物体のエネルギー保存則について考えてみます。
まずは、「復元力のみによる一般的な単振動におけるエネルギー保存則」を導出し、その後「復元力以外の力が加わった場合のエネルギー保存則の2通りの表現方法」について説明します。
3.1 エネルギー保存則(導出)
それでは復元力のみが働く場合の単振動している物体について、エネルギー保存則を導出してみましょう!
先ほどと同じモデルで考えてみます。
この単振動の運動方程式は
\( \displaystyle m \frac{d^2 x}{dt^2} = – k (x-x_0) \cdots① \)
ここで式を簡単にするために \( X = x-x_0 \) とします。
そうすると①式は
\( \displaystyle m \frac{d^2 X}{dt^2} = – k X \)
\( \displaystyle ⇔ m \frac{d^2 X}{dt^2} + kX = 0 \cdots② \)
と変形することができます。(\(x_0\) が定数であることに注意。)
②式の両辺に \( \displaystyle (v =\frac{dx}{dt} = \frac{dX}{dt} ) \)を掛けると、
\( \displaystyle ② ⇔ mv \frac{d^2 X}{dt^2} + kX \frac{dX}{dt} = 0 \)
\( \displaystyle \quad ∴ mv \frac{dv}{dt} + kX \frac{dX}{dt} = 0 \)
\( \displaystyle \quad ∴ \frac{d}{dt} \left[ \frac{1}{2} mv^2 + \frac{1}{2} kX^2 \right] = 0 \)
\( \displaystyle \quad ∴ \frac{d}{dt} \left[ \frac{1}{2} mv^2 + \frac{1}{2} k(x-x_0)^2 \right] = 0 \)
\( \displaystyle \quad ∴ \frac{1}{2} mv^2 + \frac{1}{2} k(x-x_0)^2 = [定数] \)
この式変形により、単振動において運動エネルギー\(\displaystyle\frac{1}{2}mv^2\)と復元力によるエネルギー \( \displaystyle\frac{1}{2} k (x-x_0)^2 \) (一般的にばねの場合は弾性エネルギー)が保存するという、「エネルギー保存則」が成立することが分かりました!
\( \displaystyle \frac{1}{2} mv^2 + \frac{1}{2}k(x-x_0)^2=[定数] \)
運動エネルギーと復元力によるエネルギー(弾性エネルギー)は一定!
これは覚えやすいと思うので覚えておきましょう。
3.2 エネルギー保存則の2通りの表現
先ほどは単振動の要因として復元力のみが働く場合を考えましたが、それ以外の力が働く場合に「エネルギー保存則」はどうなるでしょうか?以下の2通りについて考えてみましょう。
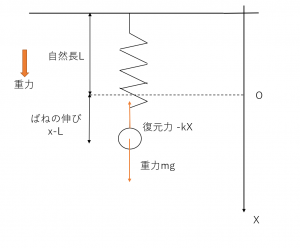
例として重力下でのばねの単振動について考えてみましょう。
以下の図を見てください。以下のような重力下における、ばね定数 \( k \)、自然長 \( L \) のばねのにくくりつけた質量 \( m \) の物体の単振動について考えていきます。

3.1.1 自然長を基準にとった場合(自然長からの変位を考える)
まずは自然長を基準にとった場合のエネルギー保存則について考えてみます。上図において天井を原点とし鉛直下向きに\(x\)軸をとります。
この時の運動方程式は
\( \displaystyle m \frac{d^2 x}{dt^2} = mg – k(x-L) \)
この両辺に \( \displaystyle v = \frac{dx}{dt} = \frac{d(x-L)}{dt} \) を掛けると
\( \displaystyle mv \frac{d^2 x}{dt^2} = mg \frac{dx}{dt} – k(x-L) \frac{d(x-L)}{dt} \)
\( \displaystyle ∴ mv \frac{dv}{dt} + k(x-L) \frac{d(x-L)}{dt} – mg \frac{dx}{dt} = 0 \)
\( \displaystyle ∴ \frac{d}{dt} \left[ \frac{1}{2} mv^2 + \frac{1}{2} k(x-L)^2 – mgx \right] = 0 \)
\( \displaystyle ∴ \frac{1}{2} mv^2 + \frac{1}{2} k(x-L)^2 – mgx = [定数] \cdots ③ \)
となることが分かります!
これは運動エネルギーとばねの弾性エネルギー、位置エネルギーの和が保存しているということを表しています。
ここで自然長を原点として、ばねの変位\(X=x-L\)を用いてエネルギー保存則を表すことを考えてみましょう。
このとき③式は以下のように変形することができます。
\( \displaystyle ③ ⇔ \frac{1}{2} mv^2 + \frac{1}{2} kⅩ^2 – mg(X+L) = [定数] \)
\( \displaystyle ∴ \frac{1}{2} mv^2 + \frac{1}{2} kX^2 – mgX = [定数] \cdots④ \)
また、④式は軸の性の向きを逆にする(鉛直向きを正)ことで \( X → -X \) とすることができ
\( \displaystyle ④ ⇔ \frac{1}{2} mv^2 + \frac{1}{2} kX^2 + mgX = [定数] \cdots ④’ \)
と変形することができます。
この第一項は運動エネルギー、第二項はばねの弾性エネルギー、第三項は重力による位置エネルギーを表しています。
特に重力の位置エネルギーについては符号を間違えるパターンが非常に多いので、必ず運動方程式と照らし合わせて符号を確認するようにしましょう!
これが自然長を基準にとった場合のエネルギー保存則です。
3.2.2 振動中心を基準にとった場合(振動中心からの変位を考える)
続いては、振動中心を基準にとった場合を考えてみましょう。
同様に天井を原点とし\(x\)軸を鉛直下向きにとると、この物体の運動方程式は
\( \displaystyle m \frac{d^2 x}{dt^2} = mg – k(x-L) \)
これを整理すると
\( \displaystyle m \frac{d^2 x}{dt^2} = – k \{ x – (L + \frac{mg}{k}) \} \)
これを単振動の運動方程式 \( ① ⇔ m \displaystyle \frac{d^2 x}{dt^2} = – k (x-x_0) \) と比較すると、
\( \displaystyle 振動中心:x_0 = L + \frac{mg}{k} \)
となることが分かります。
先ほどのエネルギー保存則の式に \( \displaystyle x_0 = L + \frac{mg}{k} \) を当てはめると
\( \displaystyle \frac{1}{2} mv^2 + \frac{1}{2} k \{ x – (L + \frac{mg}{k}) \}^2 = [定数] \)
となることが分かります。
このエネルギー保存則はつり合いの位置からの変位で表すことができます。
つり合いの位置は平衡点、つまり振動中心なので、天井から \( \displaystyle l + \frac{mg}{k} \) だけ下降したつり合いの位置を新たに原点と考え、つり合いの位置からの変位を \( \displaystyle X = x-x_0 = x – ( L + \frac{mg}{k}) \) としたとき、\( \displaystyle v = \frac{dx}{dt} = \frac{dX}{dt} \) を考慮すると、エネルギー保存則は以下のように表すことができます。
\( \displaystyle \frac{1}{2} mv^2 + \frac{1}{2} kX^2 = [定数] \)
上の形を見てわかるように、つり合いの位置を基準にとると重力による位置エネルギーが式中に登場しなくなり、より簡単な形になることが分かります。
重力の位置エネルギーを考慮しなくても良いので符号ミスもなくなるので、こちらのやり方の方を積極的に用いることをお勧めします!
4.問題を解くにあたってのコツ
単振動の問題は聞かれることがある程度決まっているので、簡単は方針の立て方を紹介していきます。
まずは単振動の運動方程式の形を作る
\( \displaystyle \frac{d^2 x}{dt^2} = -\omega^2 (x-x_0) \)
∵ \( \omega \) が分かれば、周期 \( T=\displaystyle\frac{2π}{\omega} \) がわかるから。
【例】以下の運動方程式で表される運動があるとする。
\( \displaystyle m \frac{d^2 x}{dt^2} = – k (x-x_0) \)
このときの振動周期 \( T \) は、\( \omega = \sqrt{\displaystyle\frac{k}{m}} \) より
\( \displaystyle T = \frac{2π}{\omega} = 2 \pi \sqrt{\frac{m}{k}} \)
変位を求めるには、図でイメージする・微分方程式を解くなど様々なアプローチがありますが、早く問題を解くにあたっては、単振動の方程式がsinかcosの式で表せるという性質に着目した以下の方法が便利です。
- 振幅\(A\)を求める。これはばねの初期状態の自然長からの伸びなどが考えられます。
- \(t=0\)における変位をもとにsin型かcos型か、\(\alpha\)について求める。
簡単に言うとこの二点です。例で確認してみましょう。
【例】\( t=0 \) で自然長から \( A \) だけ伸ばし状態で固定されてたばねの固定を外すとします。
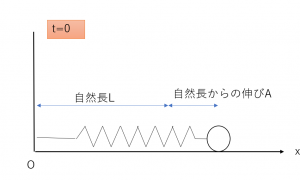
①振幅は最初の状態におけるのびが\(A\)であったことから、\( A \) だとわかります。
②次に \( t=0 \) で \( x = L+A \) だから \( x = L+A \cos \omega t \) とすると都合が良い!
このように簡単に変位を求めることができます。
速度と位置の関係(例えばばねの伸び)を問われたら、エネルギー保存則を用いるとうまくいくことが多いです。エネルギー保存則が変位と速度を結ぶ式であるということを頭に入れておきましょう。
それに加えて必ず何を基準にとったかを把握しておくこと!
5. 今回のまとめ
お疲れさまでした!最後の今回扱った内容をまとめておきます。復習に活用してください!
運動方程式:\(\displaystyle \frac{d^2 x}{dt^2} = – \omega^2 (x-x_0) \)
変位:\( \displaystyle X = x-x_0 = A \sin( \omega t + \alpha ) \)
速度:\( \displaystyle v = \frac{dX}{dt} = A \omega \cos ( \omega t + \alpha ) \)
加速度:\( \displaystyle a = \frac{dv}{dt} = – A \omega ^2 \sin ( \omega t + \alpha ) = – \omega ^2 X \)
周期:\( \displaystyle T = \frac{2 \pi }{ \omega } \)
エネルギー保存則:\( \displaystyle \frac{1}{2} mv^2 + \frac{1}{2} k (x-x_0)^2 = [定数] \)
エネルギー保存則には2通りの表現方法があることにも注意!
単振動とは、最も基本的な振動のことで等速円運動を、その円の直径上に投影したのと同じように動く、物体の往復運動のこと。
このとき、往復に要する時間を周期、振動半径を振幅という。