東大塾長の山田です。
このページでは、単振動の運動方程式から、変位の一般解を求めるやり方、さらに求めた一般解から具体例に落とし込む具体例も紹介しています!
この範囲は直接受験に関わってくることはあまりないですが、しっかりと理解しておくことで単振動に対する理解も深まるので大事な分野です。少々難しい内容もありますが一緒に理解していきましょう!
前提として単振動の知識があることが望ましいので、単振動についてまとめた記事について一度目を通しておくことをお勧めします。
1. 単振動の一般解の導出の指針
一般解を求めるとは
この記事での目的、つまり単振動の運動方程式の一般解を求めるとは、以下のようなことを言います。
運動方程式
\[\displaystyle\frac{d^2 x}{dt^2}=-\omega^2 (x-x_0) \]
から、平衡点\(x_0\)からの変位\(X=x-x_0\)の一般解
\[X=x-x_0=A\sin(\omega t +\alpha)\]
を求めるということ。ただし\(A, \alpha\)は任意定数、\(\omega\)は角振動数を表します。
求めるといってもたくさんのやり方があるのですが、今回はその中でも簡単に考えられる方法を用いて導出を行いたいと思います。
2. 単振動の一般解の導出
それでは導出を行っていきます。
2.1 一般解の導出に向けて(特殊解)
上で示した指針では角振動数\(\omega\)を用いましたが、より実践的な問題に対処できるように、単振動の問題で題材になりやすい「ばねの先につけたおもりの運動」について考察していきたいと思います!
以下の状態について考えていきましょう。以下では、ばね定数を\(k\)、おもりの質量を\(m\)として考えていきます。
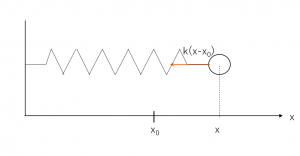
おもりが位置\(x\)にあるときの運動方程式は
\[m\displaystyle\frac{d^2 x}{dt^2}=-k(x-x_0)\]
で、さらに平衡点\(x_0\)からの変位を\(X=x-x_0\)とおくと
\[\displaystyle\frac{d^2 X}{dt^2}=-\frac{k}{m}X\cdots①\]
と変形できます。
ここで数3をやってきた人は今までの微分の経験を使ってみましょう。やっていない人は以下の合成関数の微分の公式を把握してください。
\[\displaystyle\frac{d^2}{dt^2}\sin\omega t=-\omega^2 \sin\omega t\] \[\displaystyle\frac{d^2}{dt^2}\cos\omega t=-\omega^2 \cos\omega t\]
①式と上の微分公式を見比べてみると\(\sin\omega t(または\cos\omega t)\)と\(X\)が同じ形であることに気が付けると思います。だから、
\[\omega^2=\displaystyle\frac{k}{m}\] \[∴\omega=\displaystyle\sqrt{\frac{k}{m}}\]
とおくと、
\[X∝\sin\omega t\] \[∴X=A\sin\omega t\cdots②\]
となることが分かります!②は①の解になります。
しかし、これは一般解ではありません。\(t=0\)のときについて考えてみると、\(X(0)=x-x_0=0\)となり、この特殊な条件でしか成り立たない式だからです。このような解のことを特殊解といいます。
2.2 一般解の導出
特殊解が求まったところで次は一般解を求めていきましょう。\(X∝\sin\omega t\)が分かっていれば一般解の形にするのは簡単で、つまりはどんな初期条件にも対応できれば良いので、任意定数\(\alpha, \beta\, A, B, C\)を用いて一般解は以下のように表すことができます。
\[X=A\sin(\omega t +\alpha)\] \[\quad =A\cos(\omega t +\beta)\] \[\quad=B\sin\omega t+C\cos\omega t\]
これらの定数は、初期条件によって定まります。これらの定数の導入によりいかなる単振動も表すことができます。これが単振動の運動方程式の一般解です。
\[X=x-x_0=A\sin(\omega t +\alpha)\] \[\quad\qquad\qquad=A\cos(\omega t +\beta)\] \[\quad\qquad\qquad=B\sin\omega t+C\cos\omega t\]
一般解が上のように表されるとき、「\(X=x-x_0\)は、角振動数\(\omega\)、振動中心\(x_0\)の単振動をする」といい、周期\(T\)は
\[T=\frac{2π}{\omega}=2π\sqrt{\frac{m}{k}}\]
と表すことができます。この式から質量\(m\)が大きいほど、周期\(T\)が大きくなることもわかります。これは、「質量が大きいほど速度が変化しにくい」という質量の意味の表れでもあることも、頭に入れておくと良いでしょう!
①\(X=x-x_0=A\sin(\omega t +\alpha)=B\sin\omega t+C\cos\omega t\)
の式変形が理解できなかった人向けにこの変形の解説を行います。
これはいたって簡単で、加法定理より
\[\quad A\sin(\omega t +\alpha)\] \[=A(\cos\alpha\sin\omega t+\sin\alpha\cos\omega t)\]
と変形でき、このうち\(A\cos\alpha\)と\(A\sin\alpha\)は時間\(t\)に依存しない定数なので、それぞれ新たな定数\(B, C\)に置き換えることができるので、結果
\[X=B\sin\omega t+C\cos\omega t\]
という式が導き出せます。
②任意定数のうち、\(A=\sqrt{B^2+C^2}\)のことを運動の振幅と言います。
3. 単振動の一般解から解の具体例へ
最後に一般解から、初期条件を用いて解の具体形を求める方法について考えていきましょう!今回は先ほどの一般解のうちの一つ
\[X(t)=x-x_0=B\sin\omega t+C\cos\omega t\]
について考えていきたいと思います!
変位\(X\)と速度\(v=\displaystyle\frac{dx}{dt}=\displaystyle\frac{d(x-x_0)}{dt}=\displaystyle\frac{dX}{dt}\)の初期条件として、\(X(0)=X_0, v(0)=v_0\)である運動を考えるとします。このときの変位の形は
\[X(t)=X_0\cos\omega t+\frac{v_0}{\omega}\sin\omega t\cdots③\]
と表すことができます。これに関しては以下の検算を用いて正しいことを確認してください。最終的にはこの程度の暗算はできることが望ましいです。
③に\(t=0\)を代入すると
\[X(0)=X_0\cos0+\frac{v_0}{\omega}\sin0=X_0\]
次に③を\(t\)で微分して、\(t=0\)を代入すると
\[v(0)=\left. \displaystyle\frac{dX}{dt}\right|_{t=0}=-\omega X_0\sin0+v_0\cos0=v_0\]
となり、③の形が正しいことが示されました。
③に式変形を加えていきましょう。
\[X(t)=X_0\cos\omega t+\frac{v_0}{\omega}\sin\omega t\] \[\qquad=\sqrt{X_0^2+(\displaystyle\frac{v_0}{\omega})^2}(\cos\omega t\frac{X_0}{\sqrt{X_0^2+(\displaystyle\frac{v_0}{\omega})^2}}+\sin\omega t\frac{\frac{v_0}{\omega}}{\sqrt{X_0^2+(\displaystyle\frac{v_0}{\omega})^2}})\]
ここで、\(A=\sqrt{X_0^2+(\displaystyle\frac{v_0}{\omega})^2}\)とすると
\[X(t)=A(\cos\omega t\frac{X_0}{A}+\sin\omega t\frac{\frac{v_0}{\omega}}{A})\cdots④\]
と表記することができます。
ここで
\[\left(\displaystyle\frac{X_0}{A} \right)^2+\left(\displaystyle\frac{\frac{v_0}{\omega}}{A} \right)^2=1\]
より、
\[\frac{X_0}{A}=\cos\theta,\frac{\frac{v_0}{\omega}}{A}=\sin\theta\]
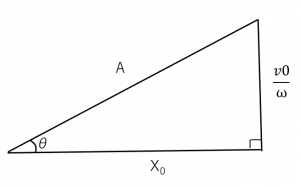
となる\(\theta\)を設定することができ、これを用いると④式は、
\[X(t)=A(\cos\omega t \cos\theta+\sin\omega t \sin\theta)\] \[\qquad =A\cos(\omega t-\theta)\]
仮に、\(X_0>0, v_0>0\)とすれば、\(X(t)\)のグラフとして下図を得ます。
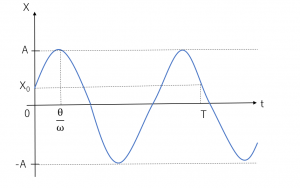
これにより運動の様子をグラフを通して理解することができます!ただし\(T\)は振動周期です。
上のグラフは変位\(X\)と時間\(t\)に関するものです。それでは変位\(X\)と位相\(\omega t\)の間にはどのような関係が成り立つでしょうか?グラフを通して理解していきましょう!
上のグラフに対して\(\omega t\)を対応させると下図のようになります。
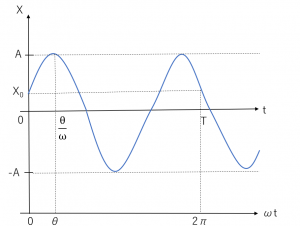
ここで、
\[T=\displaystyle\frac{2π}{\omega}, \quad\omega=\displaystyle\frac{2π}{T}\]
であるので、
\[\omega t=\displaystyle\frac{2π}{T}t\]
となります。これは「時間\(t\)を位相に換算した量」です。

例題と計算の方法がとてもわかりやすく役にたちます
最後に設定したθは、θ=(π/2)-αと考えていいですか?
X(t)グラフの周期Tの位置がずれていると思います!
ほんとだ!