

東大塾長の山田です。
このページでは、数学Bの「ベクトルの公式」を一覧にしています。
ベクトルの基本的な計算法則から,内積・三角形の面積公式・位置ベクトル・ベクトル方程式の公式をすべてまとめているので,ぜひ勉強の参考にしてください!
1. ベクトルの計算法則の公式一覧
ベクトルの加法
【交換法則】 \( \vec{ a } + \vec{ b } = \vec{ b } + \vec{ a } \)
【結合法則】 \( ( \vec{ a } + \vec{ b } ) + \vec{ c } = \vec{ a } + ( \vec{ b } + \vec{ c } ) \)
逆ベクトルと零ベクトル
① \( \vec{ a } + ( – \vec{ a } ) = \vec{ 0 } \)
② \( \vec{ a } + \vec{ 0 } = \vec{ a } \)
ベクトルの実数倍
\( k, \ l \) を実数とするとき
① \( k ( l \vec{ a } ) = ( kl ) \vec{ a } \)
② \( ( k+l ) \vec{ a } = k \vec{ a } + l \vec{ a } \)
③ \( k ( \vec{ a } + \vec{ b } ) = k \vec{ a } + + k \vec{ b } \)
ベクトルの平行条件
\( \vec{ a } \neq \vec{ 0 } \),\( \vec{ b } \neq \vec{ 0 } \) のとき
\( \vec{ a } \ /\!/ \ \vec{ b } \ \Longleftrightarrow \ \vec{ b } = k \vec{ a } \) となる実数 \( k \) がある
ベクトルの分解
\( s, \ t, \ s’, \ t’ \) は実数とする。2つのベクトル \( \vec{ a } \),\( \vec{ b } \) は \( \vec{ 0 } \) ではなく,また平行ではないとき,任意のベクトル \( \vec{ p } \) は,次の形にただ1通りに表すことができる。
\( \vec{ p } = s \vec{ a } + t \vec{ b } \)
また
\( s \vec{ a } + t \vec{ b } = s’ \vec{ a } + t’ \vec{ b } \ \Longleftrightarrow \ s = s’, \ t = t’ \)
特に \( s \vec{ a } + t \vec{ b } = 0 \ \Longleftrightarrow \ s = t = 0 \)
2. ベクトルの成分の公式一覧
成分によるベクトルの演算
\( \vec{ a } = (a_1, \ a_2) \),\( \vec{ b } = (b_1, \ b_2) \) のとき
【和】
\( \begin{align}
\vec{ a } + \vec{ b } & = (a_1, \ a_2) + (b_1, \ b_2) \\
& = (a_1 + b_1, \ a_2 + b_2)
\end{align} \)
【差】
\( \begin{align}
\vec{ a } – \vec{ b } & = (a_1, \ a_2) – (b_1, \ b_2) \\
& = (a_1 – b_1, \ a_2 – b_2)
\end{align} \)
【実数倍】
\( k \vec{ a } = k (a_1, \ a_2) = (k a_1, \ k a_2) \)
ベクトルの成分と大きさ
\( \vec{ a } = (a_1, \ a_2) \) のとき
\( \color{red}{ |\vec{ a }| = \sqrt{ {a_1}^2 + {a_2}^2 } } \)
2点 \( \vec{ a } = (a_1, \ a_2) \),\( \vec{ b } = (b_1, \ b_2) \) について
\( \displaystyle \overrightarrow{ AB } = ( b_1 – a_1, \ b_2 – a_2 ) \)
\( \displaystyle \color{red}{ |\overrightarrow{ AB }| = \sqrt{ (b_1 – a_1)^2 + (b_2 – a_2)^2 } } \)
ベクトルの平行条件
\( \vec{ 0 } \) でない2つのベクトル \( \vec{ a } \),\( \vec{ b } \) について
\( \begin{align}
\displaystyle \color{red}{ \vec{ a } \ /\!/ \ \vec{ b } } \ & \Longleftrightarrow \ \vec{ b } = k \vec{ a } となる実数 k がある \\
& \color{red}{ \Longleftrightarrow \ a_1 b_2 – a_2 b_1 = 0 }
\end{align} \)
3. ベクトルの内積の公式一覧
内積については「ベクトルの内積の全てを超わかりやすくまとめた(意味・公式・成分計算)」の記事で詳しく解説しているので,ぜひチェックしてください。
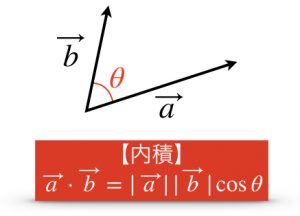
ベクトルの内積の定義
\( \vec{ 0 } \) でない2つのベクトル \( \vec{ a }, \ \vec{ b } \) のなす角を \( \theta \) とすると,\( \vec{ a } \) と \( \vec{ b } \) の内積は
\( \large{ \color{red}{ \vec{ a } \cdot \vec{ b } = \left| \vec{ a } \right| | \vec{ b } | \cos \theta } } \)
内積と成分
\( \vec{ a } = (a_1, \ a_2) \),\( \vec{ b } = (b_1, \ b_2) \) のとき
\( \large{ \color{red}{ \vec{ a } \cdot \vec{ b } = a_1 b_1 + a_2 b_2 } } \)
ベクトルのなす角
\( \vec{ 0 } \) でない2つのベクトル \( \vec{ a } = (a_1, \ a_2) \),\( \vec{ b } = (b_1, \ b_2) \) のなす角を \( \theta \) とすると
\( \displaystyle \color{red}{ \cos \theta = \frac{ \vec{ a } \cdot \vec{ b } }{ \left| \vec{ a } \right| | \vec{ b } | } = \frac{ a_1 b_1 + a_2 b_2 }{ \sqrt{ {a_1}^2 + {a_2}^2 } \ \sqrt{ {b_1}^2 + {b_2}^2 } } } \)
ただし \( 0^\circ ≦\theta ≦ 180^\circ \)
内積と平行・垂直条件
\( \vec{ a } \neq 0 \),\( \vec{ b } \neq 0 \) で,\( \vec{ a } = (a_1, \ a_2) \),\( \vec{ b } = (b_1, \ b_2) \) のとき
【平行条件】
\( \color{red}{ \begin{align}
\displaystyle \vec{ a } \ /\!/ \ \vec{ b } & \ \Longleftrightarrow \ \vec{ a } \cdot \vec{ b } = \pm |\vec{ a }| |\vec{ b }| \\
& \ \Longleftrightarrow \ a_1 b_2 – a_2 b_1 = 0
\end{align} } \)
【垂直条件】
\( \color{red}{ \begin{align}
\displaystyle \vec{ a } \perp \vec{ b } & \ \Longleftrightarrow \ \vec{ a } \cdot \vec{ b } = 0 \\
& \ \Longleftrightarrow \ a_1 b_1 + a_2 b_2 = 0
\end{align} } \)
内積の性質
\( k \) は実数とする。
【内積の演算法則】
① \( \vec{ a } \cdot \vec{ b } = \vec{ b } \cdot \vec{ a } \)
② \( \begin{cases}
\displaystyle ( \vec{ a } + \vec{ b } ) \cdot \vec{ c } = \vec{ a } \cdot \vec{ c } + \vec{ b } \cdot \vec{ c } \\
\vec{ a } \cdot ( \vec{ b } + \vec{ c } ) = \vec{ a } \cdot \vec{ b } + \vec{ a } \cdot \vec{ c }
\end{cases} \)
③ \( \displaystyle \left( k \vec{ a } \right) \cdot \vec{ b } = \vec{ a } \cdot ( k \vec{ b } ) = k ( \vec{ a } \cdot \vec{ b } ) \)
【ベクトルの大きさと内積】
① \( \displaystyle \vec{ a } \cdot \vec{ a } = \left| \vec{ a } \right|^2 \)
② \( \displaystyle \left| \vec{ a } \right| = \sqrt{ \vec{ a } \cdot \vec{ a } } \)
③ \( \displaystyle – \left| \vec{ a } \right| | \vec{ b } | ≦ \vec{ a } \cdot \vec{ b } ≦ \left| \vec{ a } \right| | \vec{ b } | \)
空間のベクトルの内積の公式
【内積の定義】
\( \vec{ 0 } \) でない2つのベクトル \( \vec{ a }, \ \vec{ b } \) のなす角を \( \theta \) とすると
\( \large{ \color{red}{ \vec{ a } \cdot \vec{ b } = \left| \vec{ a } \right| | \vec{ b } | \cos \theta } } \)
【内積と成分】
\( \vec{ a } = (a_1, \ a_2, \ a_3) \),\( \vec{ b } = (b_1, \ b_2, \ b_3) \) のとき
\( \large{ \color{red}{ \vec{ a } \cdot \vec{ b } = a_1 b_1 + a_2 b_2 + a_3 b_3 } } \)
【ベクトルのなす角の公式】
\( \large{ \color{red}{ \displaystyle \cos \theta = \frac{ \vec{ a } \cdot \vec{ b } }{ \left| \vec{ a } \right| | \vec{ b } | } } } \)
\( \color{red}{ \displaystyle = \frac{ a_1 b_1 + a_2 b_2 + a_3 b_3 }{ \sqrt{ {a_1}^2 + {a_2}^2 + {a_3}^2 } \sqrt{ {b_1}^2 + {b_2}^2 + {b_3}^2 } } } \)
ただし \( 0^\circ ≦\theta ≦ 180^\circ \)
【垂直条件】
\( \color{red}{ \begin{align}
\displaystyle \vec{ a } \perp \vec{ b } & \ \Longleftrightarrow \ \vec{ a } \cdot \vec{ b } = 0 \\
& \ \Longleftrightarrow \ a_1 b_1 + a_2 b_2 + a_3 b_3 = 0
\end{align} } \)
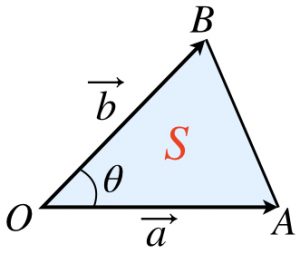
4. ベクトルの三角形の面積公式
ベクトルの三角形の面積公式については「ベクトルの三角形の面積公式を超わかりやすく説明した」の記事で詳しく解説しているので,ぜひチェックしてください。

\( \triangle OAB \) で,\( \overrightarrow{ OA } = \vec{ a } = (a_1, \ a_2) \),\( \overrightarrow{ OB } = \vec{ b } = (b_1, \ b_2) \) とすると,面積 \( S \) は
【ベクトル表示Ver.】
\( \displaystyle \large{ \color{red}{ S = \frac{1}{2} \sqrt{ \left| \vec{ a } \right|^2 |\vec{ b }|^2 – ( \vec{ a } \cdot \vec{ b } )^2 } } } \)
【成分表示Ver.】
\( \displaystyle \large{ \color{red}{ S = \frac{1}{2} |a_1 b_2 – a_2 b_1| } } \)
5. 位置ベクトルの公式一覧
位置ベクトルについては「位置ベクトルを超わかりやすく解説した(内分・外分・重心)」の記事で詳しく解説しているので,ぜひチェックしてください。
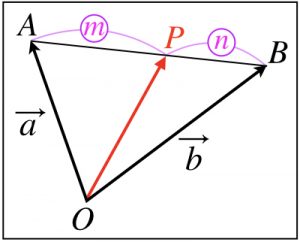
内分点の位置ベクトル
2点 \( A(\vec{ a }), \ B( \vec{ b } ) \) を結ぶ線分ABを \( m : n \) に内分する点Pの位置ベクトルを \( \vec{ p } \) とすると
\( \displaystyle \large{ \color{red}{ \vec{ p } = \frac{ n \vec{ a } + m \vec{ b } }{ m + n } } } \)
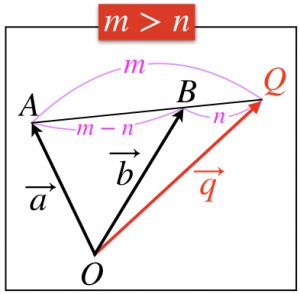
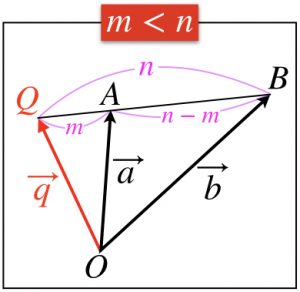
外分点の位置ベクトル
2点 \( A(\vec{ a }) \),\( B( \vec{ b } ) \) を結ぶ線分ABを \( m : n \) に外分する点Qの位置ベクトルを \( \vec{ q } \) とすると
\( \displaystyle \large{ \color{red}{ \vec{ q } = \frac{ -n \vec{ a } + m \vec{ b } }{ m – n } } } \)
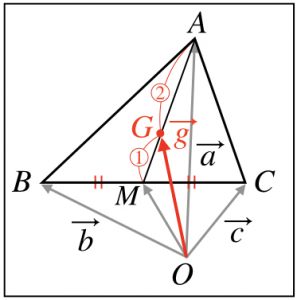
三角形の重心の位置ベクトル
3点 \( A(\vec{ a }) \),\( B( \vec{ b } ) \),\( C( \vec{ c } ) \) を頂点とする△ABCの重心Gの位置ベクトル \( \vec{ g } \) は
\( \displaystyle \large{ \color{red}{ \vec{ g } = \frac{ \vec{ a } + \vec{ b } + \vec{ c } }{ 3 } } } \)
6. ベクトル方程式の公式一覧
ベクトル方程式については「ベクトル方程式を超わかりやすく解説した」の記事で詳しく解説しているので,ぜひチェックしてください。
直線のベクトル方程式(共線条件)
直線上に任意の点Pの位置ベクトルを \( \vec{ p } \) とし,\( s \) と \( t \) を実数の変数とする。
【定点 \( A(\vec{ a }) \) を通り,\( \vec{ d } \) に平行な直線】
\( \large{ \color{red}{ \vec{ p } = a + t \vec{ d } } } \)
(\( \vec{ d } \) は直線の方向ベクトル)
【異なる2点 \( A(\vec{ a }) \),\( B(\vec{ b }) \) を通る直線】(共線条件)
\( \large{ \color{red}{ \vec{ p } = (1-t) \vec{ a } + t \vec{ b } } } \)
または \( \large{ \color{red}{ \vec{ p } = s \vec{ a } + t \vec{ b } } } \),\( \large{ \color{red}{ s + t = 1 } } \)
【定点 \( A(\vec{ a }) \) を通り,ベクトル \( \vec{ n } \) に垂直な直線】
\( \large{ \color{red}{ \vec{ n } \cdot ( \vec{ p } – \vec{ a } ) = 0 } } \)
(\( \vec{ n } \) は直線の法線ベクトル)
ベクトルの終点の存在範囲
\( \overrightarrow{ OA } = \vec{ a } \),\( \overrightarrow{ OB } = \vec{ b } \),\( \overrightarrow{ OP } = \vec{ p } \) とし,\( \color{red}{ \vec{ p } = s \vec{ a } + t \vec{ b } } \) とする(\( s \),\( t \) は実数の変数)。
\( s \),\( t \) に条件があると,次のような図形を表す。
【直線AB】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
s + t = 1
\end{cases} } \) は,「直線AB」を表す。
【線分AB】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
s + t = 1 \\
s ≧ 0 \\
t ≧ 0 \\
\end{cases} } \) は,「線分AB」を表す。
【△OABの周と内部】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s + t ≦ 1 \\
s ≧ 0 \\
t ≧ 0 \\
\end{cases} } \) は,「△OABの周と内部」を表す。
【平行四辺形OACBの周と内部】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s ≦ 1 \\
0 ≦ t ≦ 1 \\
\end{cases} } \) は,「平行四辺形OACBの周と内部」を表す。
円のベクトル方程式
3つの定点を \( A(\vec{ a }) \),\( B(\vec{ b }) \),\( C(\vec{ c }) \) とし,円周上の任意の点を \( P(\vec{ p }) \) とする。
【中心C,半径rの円】
\( \large{ \color{red}{ |\vec{ p } – \vec{ c }| = r } } \)
(または \( \color{red}{ ( \vec{ p } – \vec{ c } ) \cdot ( \vec{ p } – \vec{ c } ) = r^2 } \))
【線分ABを直径とする円】
\( \large{ \color{red}{ ( \vec{ p } – \vec{ a } ) \cdot ( \vec{ p } – \vec{ b } ) = 0 } } \)
以上が数学Bのベクトルで学習する公式すべてです!
ベクトルの終点の存在範囲で線分ABを表すとき、s+t=1 が必要と思います。
大好きです
それ知りたかったです
gれあt
よかった
わかりやすいです☻