東大塾長の山田です。
このページでは、「ベクトル方程式」について解説します。
今回は重要なベクトル方程式をまとめているのはもちろん,「ベクトル方程式とは何か?」という基本的なことから,それぞれのベクトル方程式を1つ1つ具体例をあげながら,超わかりやすく解説していきます。
ぜひ勉強の参考にしてください!
1. ベクトル方程式まとめ
まずは重要なベクトル方程式の公式をまとめておきます。
直線上に任意の点Pの位置ベクトルを \( \vec{ p } \) とし,\( s \) と \( t \) を実数の変数とする。
【定点 \( A(\vec{ a }) \) を通り,\( \vec{ d } \) に平行な直線】
\( \large{ \color{red}{ \vec{ p } = \vec{ a } + t \vec{ d } } } \)
(\( \vec{ d } \) は直線の方向ベクトル)
【異なる2点 \( A(\vec{ a }) \),\( B(\vec{ b }) \) を通る直線】(共線条件)
\( \large{ \color{red}{ \vec{ p } = (1-t) \vec{ a } + t \vec{ b } } } \)
または \( \large{ \color{red}{ \vec{ p } = s \vec{ a } + t \vec{ b } } } \),\( \large{ \color{red}{ s + t = 1 } } \)
【定点 \( A(\vec{ a }) \) を通り,ベクトル \( \vec{ n } \) に垂直な直線】
\( \large{ \color{red}{ \vec{ n } \cdot ( \vec{ p } – \vec{ a } ) = 0 } } \)
(\( \vec{ n } \) は直線の法線ベクトル)
\( \overrightarrow{ OA } = \vec{ a } \),\( \overrightarrow{ OB } = \vec{ b } \),\( \overrightarrow{ OP } = \vec{ p } \) とし,\( \color{red}{ \vec{ p } = s \vec{ a } + t \vec{ b } } \) とする(\( s \),\( t \) は実数の変数)。
\( s \),\( t \) に条件があると,次のような図形を表す。
【直線AB】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
s + t = 1
\end{cases} } \) は,「直線AB」を表す。
【線分AB】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
s + t = 1 \\
s ≧ 0 \\
t ≧ 0 \\
\end{cases} } \) は,「線分AB」を表す。
【△OABの周と内部】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s + t ≦ 1 \\
s ≧ 0 \\
t ≧ 0 \\
\end{cases} } \) は,「△OABの周と内部」を表す。
【平行四辺形OACBの周と内部】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s ≦ 1 \\
0 ≦ t ≦ 1 \\
\end{cases} } \) は,「平行四辺形OACBの周と内部」を表す。
3つの定点を \( A(\vec{ a }) \),\( B(\vec{ b }) \),\( C(\vec{ c }) \) とし,円周上の任意の点を \( P(\vec{ p }) \) とする。
【中心C,半径rの円】
\( \large{ \color{red}{ |\vec{ p } – \vec{ c }| = r } } \)
(または \( \color{red}{ ( \vec{ p } – \vec{ c } ) \cdot ( \vec{ p } – \vec{ c } ) = r^2 } \))
【線分ABを直径とする円】
\( \large{ \color{red}{ ( \vec{ p } – \vec{ a } ) \cdot ( \vec{ p } – \vec{ b } ) = 0 } } \)
以上がベクトル方程式の公式まとめです。
次の章からは,「ベクトル方程式とは何か?」という根本のところから解説します。
2. ベクトル方程式とは?
ベクトル方程式とは,「ある条件を満たす点を,ベクトルで表現した式」のことです。
数学では,直線は「点の集合」です。
例えば,直線 \( y = 2x+1 \) の式は,点 \( (x, \ y) \) が満たす条件を式にしたもので,この条件を満たす点の集合が直線になります。
これをベクトルで考えると,ベクトルでは,「点の位置」を表すのに便利な「位置ベクトル」というものがありましたね。
この位置ベクトルを利用して,「曲線上の点の位置ベクトル \( P(\vec{ p }) \) の満たす関係式を,その曲線の ベクトル方程式」といいます。
言葉ではピンとこないと思うので,次の章から具体的にベクトル方程式の例をみていきましょう。
3. 直線のベクトル方程式
まずは直線を表すベクトル方程式の解説です。
3.1 定点 \( A(\vec{ a }) \) を通り,\( \vec{ d } \) に平行な直線のベクトル方程式
定点 \( A(\vec{ a }) \) を通り,\( \vec{ 0 } \) でないベクトル \( \vec{ d } \) に平行な直線のベクトル方程式は
\( \large{ \color{red}{ \vec{ p } = \vec{ a } + t \vec{ d } } } \)
点 \( A(\vec{ a }) \) を通り,\( \vec{ 0 } \) でないベクトル \( \vec{ d } \) に平行な直線を \( g \) とします。
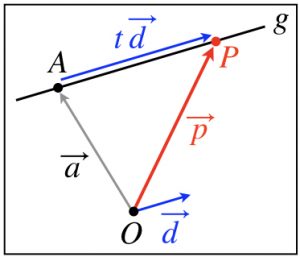
点 \( P(\vec{ p }) \) が直線 \( g \) 上にあるということは
\( \overrightarrow{ AP } = t \vec{ d } \)
と表すことができます。
\( \overrightarrow{ AP } = \vec{ p } – \vec{ a } \) なので
\( \vec{ p } – \vec{ a } = t \vec{ d } \)
∴ \( \color{red}{ \vec{ p } = \vec{ a } + t \vec{ d } } \)
と表すことができます。
このとき,\( \vec{ d } \) を直線 \( g \) の 方向ベクトル ,\( t \) を 媒介変数 といいます。
また,このベクトル方程式を,ベクトルの成分で表すことを考えます。
原点を \( O \),点Aの座標を \( A (x_1, \ y_1) \),直線 \( g \) 上の任意の点を \( P(x, \ y) \) とし,\( \vec{ d } = (l, \ m) \) とすると,ベクトル方程式は
\( \begin{align}
(x, \ y) & = (x_1, \ y_1) + t (l, \ m) \\
& = (x_1 + lt, \ y_1 + mt)
\end{align} \)
よって \( \displaystyle \begin{cases}
x = x_1 + lt \\
y = y_1 + mt
\end{cases} \)
媒介変数 \( t \) を用いて表されたこの連立方程式を,直線 \( g \) の 媒介変数表示 といいます。
この連立方程式から \( t \) を消去すると,次のことが成り立ちます。
点 \( (x_1, \ y_1) \) を通り,\( \vec{ d } = (l, \ m) \) が方向ベクトルである直線の方程式は
\( m ( x – x_1 ) – l ( y – y_1 ) = 0 \)
3.2 異なる2点を通る直線のベクトル方程式(共線条件)
異なる2点 \( A(\vec{ a }) \),\( B(\vec{ b }) \) を通る直線のベクトル方程式は
\( \large{ \color{red}{ \vec{ p } = (1-t) \vec{ a } + t \vec{ b } } } \)
または \( \large{ \color{red}{ \vec{ p } = s \vec{ a } + t \vec{ b }, \ s + t = 1 } } \)
平面上の異なる2点 \( A(\vec{ a }) \),\( B(\vec{ b }) \) を通る直線上に,点 \( P(\vec{ p }) \) があることを考えます。
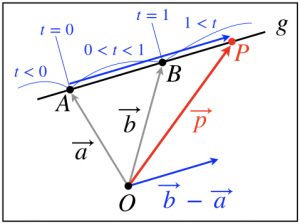
すると \( \overrightarrow{ OP } = \overrightarrow{ OA } + t \overrightarrow{ AB } \) と表されるので
\( \begin{align}
\color{red}{ \vec{ p } } & = \vec{ a } + t ( \vec{ b } – \vec{ a } ) \\
& \color{red}{ = (1-t) \vec{ a } + t \vec{ b } }
\end{align} \)
と表すことができます。
この方程式において,\( 1-t = s \) とおくと
\( \color{red}{ \vec{ p } = s \vec{ a } + t \vec{ b } } \),\( \color{red}{ s + t = 1 } \)
とも表すことができます。
ベクトル方程式ではピンとこない人もいると思うので,具体例で考えてみましょう。
例えば,A(2,1),B(3,3)のとき,直線ABの式は
\( \mathrm{ AB } : \color{blue}{ y = 2x-3 } \)
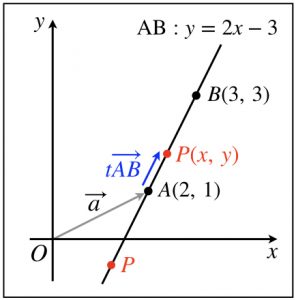
\( P(x, \ y) \) として,ベクトルで考えると
\( \begin{align}
\vec{ p } & = \overrightarrow{ OA } + t \overrightarrow{ AB } \\
\\
\displaystyle (x, \ y) & = \vec{ a } + t ( \vec{ b } – \vec{ a } ) \\
\\
& = (2, \ 1) + t (1, \ 2) \\
\\
& = (t+2, \ 2t+1)
\end{align} \)
よって
\( \displaystyle \color{red}{ \begin{cases}
x =t+2 \\
y = 2t+1
\end{cases} } \)
と媒介変数表示で表すことができます。
この連立方程式から \( t \) を消去すると,直線の式「\( \color{blue}{ y = 2x-3 } \)」が成り立つことがわかりますね!
3.3 定点 \( A(\vec{ a }) \) を通り,ベクトル \( \vec{ n } \) に垂直な直線のベクトル方程式
定点 \( A(\vec{ a }) \) を通り,\( \vec{ 0 } \) でないベクトル \( \vec{ n } \) に垂直な直線のベクトル方程式は
\( \large{ \color{red}{ \vec{ n } \cdot ( \vec{ p } – \vec{ a } ) = 0 } } \)
(\( \vec{ n } \) は直線の法線ベクトル)
定点 \( A(\vec{ a }) \) を通り,ベクトル \( \vec{ n } \) に垂直な直線は,次の図のようになります。
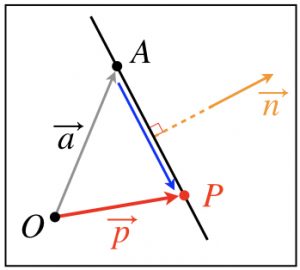
点 \( P(\vec{ p }) \) がこの直線上にあるということは
\( \vec{ n } \perp \overrightarrow{ AP } \)
ということだから,内積を用いて表すと
\( \vec{ n } \cdot \overrightarrow{ AP } = 0 \)
∴ \( \color{red}{ \vec{ n } \cdot ( \vec{ p } – \vec{ a } ) = 0 } \)
このベクトル方程式についても,ベクトル方程式ではピンとこない人もいると思うので,具体例で考えてみましょう。
先ほどの例と同様な点A,Bとすると「AB:\( y = 2x-3 \)」,この直線に垂直な直線の式を計算で求めると
\( \color{blue}{ \displaystyle y = – \frac{1}{2} x + 2 } \)
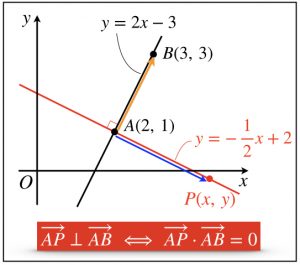
\( P(x, \ y) \) として,ベクトルで考えると
\( \overrightarrow{ AP } \cdot \overrightarrow{ AB } = 0 \)
\( \left( \begin{array}{c}
x-2 \\
y-1
\end{array} \right) \cdot \left( \begin{array}{c}
1 \\
2
\end{array} \right) = 0 \)
\( 1 \cdot (x-2) + 2 \cdot (y-1) = 0 \)
\( x+2y-4=0 \)
∴ \( \displaystyle \color{blue}{ y = – \frac{1}{2} x + 2 } \)
よって,ベクトル方程式 \( \vec{ n } \cdot ( \vec{ p } – \vec{ a } ) \) は,定点 \( A(\vec{ a }) \) を通り,ベクトル \( \vec{ n } \) に垂直な直線を表すことが確認できました。
4. ベクトルの終点の存在範囲
次は「ベクトルの終点の存在範囲」について解説していきます。
\( \overrightarrow{ OA } = \vec{ a } \),\( \overrightarrow{ OB } = \vec{ b } \),\( \overrightarrow{ OP } = \vec{ p } \) とし,\( \color{red}{ \vec{ p } = s \vec{ a } + t \vec{ b } } \) とする(\( s \),\( t \) は実数の変数)。
\( s \),\( t \) に条件があると,次のような図形を表す。
【直線AB】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
s + t = 1
\end{cases} } \) は,「直線AB」を表す。
【線分AB】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
s + t = 1 \\
s ≧ 0 \\
t ≧ 0 \\
\end{cases} } \) は,「線分AB」を表す。
【△OABの周と内部】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s + t ≦ 1 \\
s ≧ 0 \\
t ≧ 0 \\
\end{cases} } \) は,「△OABの周と内部」を表す。
【平行四辺形OACBの周と内部】
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s ≦ 1 \\
0 ≦ t ≦ 1 \\
\end{cases} } \) は,「平行四辺形OACBの周と内部」を表す。
4.1 直線ABと線分AB
「3.2 異なる2点を通る直線のベクトル方程式」で解説した通り,点 \( P(\vec{ p }) \) が
\( \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
s + t = 1
\end{cases} \) \( \cdots ① \)
を満たしながら動くとき,点 \( P(\vec{ p }) \) の存在範囲は直線ABです。
では,点 \( P(\vec{ p }) \) の存在範囲を線分AB上に限定するように考えてみましょう。
- \( t = 0 \ (s=1) \) のとき,点 \( P(\vec{ p }) \) は点 \( A(\vec{ a }) \) と一致する。
- \( t = 0.5 \ (s=0.5) \) のとき,点 \( P(\vec{ p }) \) は線分ABの中点に位置する。
- \( t = 1 \ (s=0)\) のとき,点 \( P(\vec{ p }) \) は点 \( B(\vec{ b }) \) と一致する。
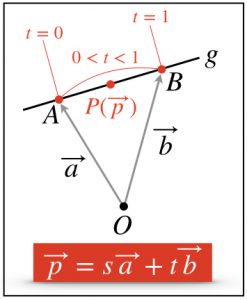
つまり,①で「\( 0 ≦ t ≦ 1 \)(\(0 ≦ s ≦ 1 \))」のとき,線分ABを表すことになります。
これを整理して,
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
s + t = 1 \\
s ≧ 0 \\
t ≧ 0 \\
\end{cases} } \) は,「線分AB」を表します。
4.2 △OAB
次に,
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s + t ≦ 1 \\
s ≧ 0 \\
t ≧ 0 \\
\end{cases} } \) は,「△OABの周と内部」を表す。
について考えてみましょう。
例えば,\( s + t = 0.5 \) のとき
\( \begin{align}
\vec{ p } & = (0.5 – t) \vec{ a } + t \vec{ b } \\
& = 0.5 \vec{ a } + t ( \vec{ b } – \vec{ a } ) \\
& = 0.5 \overrightarrow{ OA } + t \overrightarrow{ AB }
\end{align} \)
となり,\( t \) を \( 0 ≦ t ≦ 0.5 \) の範囲で変化させると,点Pは下の図の線分ABに平行な線分A’B’上を動きます。
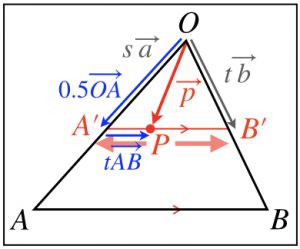
そして,\( s + t \) を,「\( 0 ≦ s + t ≦1 \)」の範囲で変化させると,線分A’B’は△OAB上全体を動くことになります。
よって
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s + t ≦ 1 \\
s ≧ 0 \\
t ≧ 0 \\
\end{cases} } \) は,「△OABの周と内部」を表します。
4.3 平行四辺形OACB
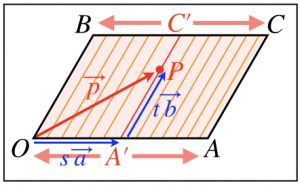
さいごに
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s ≦ 1 \\
0 ≦ t ≦ 1 \\
\end{cases} } \) は,「平行四辺形OACBの周と内部」を表す。
について考えてみます。
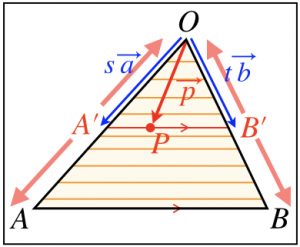
例えば,\( s = 0.5 \) のとき
\( \vec{ p } = 0.5 \overrightarrow{ OA } + t \overrightarrow{ OB } \)
となり,\( t \) を \( 0 ≦ t ≦ 1 \) の範囲で変化させると,点Pは下の図の線分OBに平行な線分A’C’上を動きます。
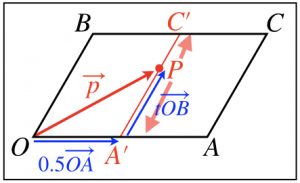
そして,\( s \) を,「\( 0 ≦ s ≦1 \)」の範囲で変化させると,線分A’C’は線分OBから線分ACまで平行に動くことになります。
よって
\( \color{red}{ \begin{cases}
\vec{ p } = s \vec{ a } + t \vec{ b } \\
0 ≦ s ≦ 1 \\
0 ≦ t ≦ 1 \\
\end{cases} } \) は,「平行四辺形OACBの周と内部」を表します。
5. 円のベクトル方程式
さいごは「円のベクトル方程式」について解説していきます。
円のベクトル方程式は簡単ですよ!
5.1 中心がC,半径がrの円のベクトル方程式
3つの定点を \( A(\vec{ a }) \),\( B(\vec{ b }) \),\( C(\vec{ c }) \) とし,円周上の任意の点を \( P(\vec{ p }) \) とすると
【中心C,半径rの円】
\( \large{ \color{red}{ |\vec{ p } – \vec{ c }| = r } } \)
(または \( \color{red}{ ( \vec{ p } – \vec{ c } ) \cdot ( \vec{ p } – \vec{ c } ) = r^2 } \))
中心C,半径rの円上にある点Pについて考えます。
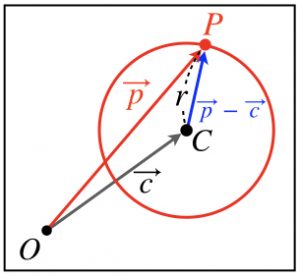
円の定義は「Cからの距離がrである点の集まり」なので
\( CP = r \)
これをベクトルで表すと
\( | \overrightarrow{ CP } | = r \)
よって \( \color{red}{ | \vec{ p } – \vec{ c } | = r } \)
ゆえに \( | \vec{ p } – \vec{ c } |^2 = r^2 \)
したがって \( ( \vec{ p } – \vec{ c } ) \cdot ( \vec{ p } – \vec{ c } ) = r^2 \)
また,\( C(a, \ b) \),\( P(x, \ y) \) として成分で表すと
\( \color{red}{ (x-a)^2 + (y-b)^2 = r^2 } \)
これは数学Ⅱで学習する円の方程式ですね!
5.2 直径がABの円のベクトル方程式
3つの定点を \( A(\vec{ a }) \),\( B(\vec{ b }) \),\( C(\vec{ c }) \) とし,円周上の任意の点を \( P(\vec{ p }) \) とすると
【線分ABを直径とする円】
\( \large{ \color{red}{ ( \vec{ p } – \vec{ a } ) \cdot ( \vec{ p } – \vec{ b } ) = 0 } } \)
直径がABの円周上の点Pについて考えます。
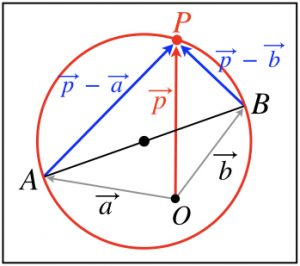
直径に対する円周角は直角であるから \( AP \perp BP \)
ゆえに \( \overrightarrow{ AP } \cdot \overrightarrow{ BP } = 0 \)
よって \( ( \overrightarrow{ OP } – \overrightarrow{ OA } ) \cdot ( \overrightarrow{ OP } – \overrightarrow{ OB } ) = 0 \)
∴ \( \color{red}{ (\vec{ p } – \vec{ a } ) \cdot ( \vec{ p } – \vec{ b } ) = 0 } \)
以上がベクトル方程式の解説すべてです!


この記事のおかげでかなり深い理解を得られました。ありがとうございます!