
東大塾長の山田です。
このページでは、円運動について「位置→速度→加速度」の順で詳しく説明したうえで、運動方程式をいかに立てるか、遠心力はどのように使えば良いか、などについて詳しくまとめてあります。
ぜひ勉強の参考にしてください!
1. 円運動について
円運動とは、物体の運動の向きとは垂直な方向に働く力によって引き起こされる運動のことです。
特に、円周上を運動する物体の速度が一定であるときは等速円運動と呼ばれます。
等速円運動の場合、軌道は円となります。
特に、中心力が働くことによって引き起こされることが多いです。
中心力:その大きさが、原点と物体の距離\(r\)にのみ依存し、方向が減点と物体を結ぶ線に沿っている運動のこと
例として万有引力やクーロン力が考えられますね!
万有引力:\( F(r)=G\displaystyle \frac{Mm}{r^2} \propto \displaystyle \frac{1}{r^2} \)
クーロン力:\( F(r)=k\displaystyle \frac{q_1q_2}{r^2} \propto \displaystyle \frac{1}{r^2} \)
2. 円運動の記述
それでは実際に円運動はどのように表すことができるのか、順を追って確認していきましょう!
途中で新しい物理量が出てきますがそれについては、その都度しっかりと説明していきます。
2.1 位置
まず円運動している物体の位置はどのように記述できるでしょうか?
いままでの、直線・放物運動では\(xy\)座標(直行座標)を定めて運動を記述してきたことが多かったと思います。
例えば半径\(r\)の等速円運動でも同様に考えようと思うと下図のようになります。
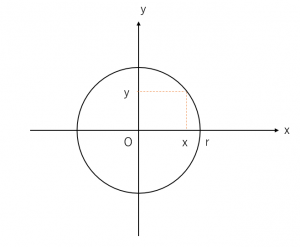
このように未知量を\(x\)、\(y\)を未知量とすると、軌道が円であることを表す条件が必要になります。(\(x^2+y^2=r^2\))
これだと運動の記述を行う際に式が複雑になってしまい、円運動を記述するのに \(x\) と \(y\) という二つの未知量を用いることは適切でないということが分かります。
つまり未知量を一つにしたいわけです。そのためにはどのようにすればよいでしょうか?
結論としては未知量として中心角 \(\theta\) を用いることが多いです。
つまり直行座標 (\(x\),\(y\)) ではなく、極座標 (\(r\),\(\theta\)) を用いるということです!

そうすることで、\((x,y)=(rcos\theta, rsin\theta)\) と表すことができ、軌道が円である条件 (\(x^2+y^2=r^2\)) にこれを代入することで自動的に満たされることもわかります。
以下では円運動を記述する際の変数としては、中心角 \(\theta\) を用いることにします。
2.1 直行座標から極座標にする意味(運動方程式への道筋)
少し脱線するように思えますが、円運動の運動方程式を立てるときの方針について考えるうえでとても重要なので、ぜひ読んでください!
円運動を記述する際は極座標(\(r\),\(\theta\))を用いることはわかったと思いますが、こうすることで何が分かるでしょうか?
まずは座標系を取る意味について説明します。
簡潔に言うと、「座標を地表に対して固定する」ことは「あみの目を空間に固定する」ことと同値です。
「座標を地表に対して固定する」⇔「あみの目を空間に固定する」
これだけでは何を言っているかわからないと思うので、以下から図を用いて詳しく説明します。
まず直交座標(\(x\),\(y\))と極座標(\(r\),\(\theta\))をとると、それぞれの網の目は以下の図のオレンジ線のように定義できます。
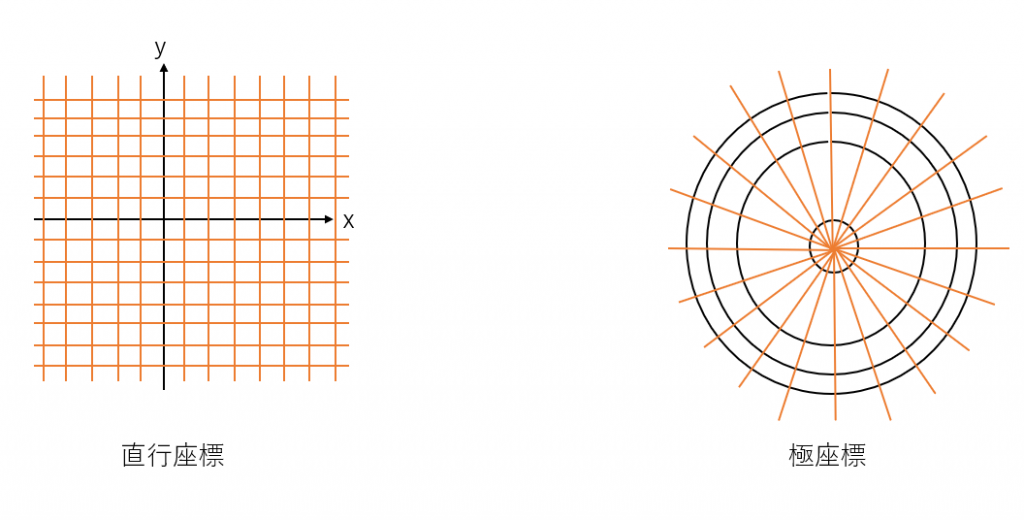
つまりそれぞれの座標軸に沿って垂直な方向に向かって、あみの目が伸びているということです。
そして座標系と網の目に関する重要な決まり事として、「ベクトルの成分は、そのベクトルが存在する点のあみの目に沿って読む」という決まりがあります。
ベクトルの成分は、そのベクトルが存在する点のあみの目に沿って読む。
これも図を通して理解しましょう。
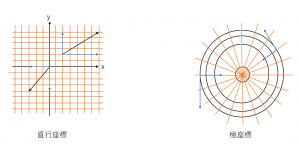
上図に着目してください。
まずは直交座標についてみてみると、黒矢印がベクトルとして青矢印がそれを分解した成分となっています。これは直交座標で運動方程式をたてるときに、x方向とy方向についてそれぞれ立てていることからも理解しやすいと思います。
つまり運動方程式は、それぞれの網の目に沿ってたてれば良いということです
次に直交座標についてみてみましょう。同様に網の目に沿って成分を分解してみると、それぞれが円の接線方向と中心方向(中心から逆に向かう向きでもよい)を向いていることが分かります。
つまり円運動の方程式について以下のことが分かります!
運動方程式はそれぞれ網の目に沿ってたてればよい
⇒円運動の方程式は「接線方向」と「中心方向」についてたてれば良い!
これで円運動の運動方程式をどのように立てれば良いかの指針が立ちましたね。
それでは話を戻して「位置」の次の話、「速度」へ入りましょう。
2.2 速度(角速度)
それでは円運動における速度について考えてみましょう。
まず、円運動における速度において絶対に成り立っていることがあります。それは「速度は接線成分のみを持つ」ということです。
円運動において、速度は接線成分のみを持つ
以下ではその速度成分を \(v\) として考えていきます。それでは以下の図を見てください。

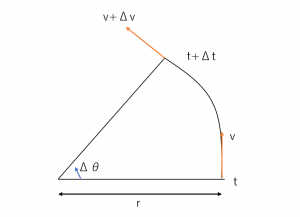
半径 \(r\) の円周上を速度 \(v\) で運動している物体があるとします。
時刻 \(t\) から \(t+\Delta t\) の間に中心角 \(\Delta\theta\) 分だけ物体が運動したとします(ただしこの\(θ\)はラジアン)。
このとき進んだ距離は扇形の弧の長さは \(r\theta\) であり、このことにより速度成分\(v\)は以下のように表すことができます。
\( \displaystyle v=\displaystyle \lim_{ \Delta t \to 0 }\frac{r\Delta \theta}{\Delta t}=r\displaystyle \frac{d\theta}{dt} \)
上の式がよく分からない方はこちらの記事をどうぞ。
ここで大切な物理量として角速度 \(\omega=\displaystyle \frac{d\theta}{dt}\) を導入します。
定義の式からもわかるように、角速度とは「単位時間あたりに何ラジアン回転したか」を表す物理量です。
角速度 \(\omega=\displaystyle \frac{d\theta}{dt}\)
定義からわかるように、角速度は単位時間あたりに何ラジアン回転したかを表す物理量である。
例えば周期 \(T\)[s]で円軌道を一周する物体があったとすると、このとき物体の角速度 \(\omega\) と周期 \(T\) の間には以下の関係が成り立つことが分かる。
\( \displaystyle 2π =\omega T \)
この関係はたまに聞かれることがあるのですぐに導き出せるようにすると便利です。
\(\omega=\displaystyle \frac{d\theta}{dt}\) を用いると速度成分は以下のように書き表すことができます。
半径\(r\)の円周上を等速円運動している物体の速度\(v\)は以下のように表せる。
\( \displaystyle v = r \omega \)
ただし \( \omega \) は角速度と呼ばれる物理量で、\( \omega = \displaystyle \frac{d\theta}{dt} \) で定義される。
つまり半径に角速度をかけ合わせれば速度が求まるということです!
上の式はこれからの話でよく出てくるので、しっかりと頭に入れておきましょう。
2.3 加速度
最後に円運動における加速度について考えてみましょう。運動方程式を立てるうえでとても重要です。
速度の時の同じように半径\(r\)の円周上を運動している物体について考えてみます。
時刻 \(t\)\ から \(t+\Delta t\) の間に、速度が \(v\) から \(v+\Delta t\) に変化し、中心角 \(\Delta\theta\) だけ変化したとすると、加速度 \(\vec{a}\) は以下のように表すことができます。
\( \displaystyle \vec{a} = \lim_{\Delta t \to 0} \frac{\Delta \vec{v}}{\Delta t} \cdots ① \)
これはどう式変形できるでしょうか?上の運動を図で考えてみると以下のようになります。
上の図の速度の変位と角度変化に注目してみましょう。これら二つの要素のみについて考えた図が下図になります。
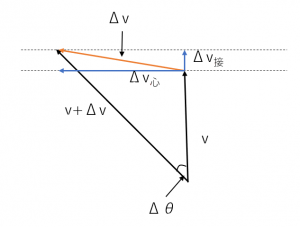
なお、図中の\(\Delta v_接\)と\(\Delta v_心\)はそれぞれ「\(\Delta \vec{v}\)を接線方向と中心方向に分解したときの各成分の速度」という意味です。
このとき\(\Delta \vec{v}\)の各成分は
\( \begin{cases}
\displaystyle 接線方向:\Delta v_接 =(v+\Delta v) \cos\Delta\theta – v\\
\displaystyle 中心方向:\Delta v_心 = (v+\Delta v) \sin\Delta\theta
\end{cases} \)
と表すことができ、結局\(\Delta t →0\)となるから、\(\Delta \theta ≒ 0\)としても良く、
\( \begin{cases}
\displaystyle \cos \Delta\theta ≒ 1\\
\displaystyle \sin \Delta\theta ≒ \Delta\theta
\end{cases} \)
と近似することができ、このことにより二式は
\( \begin{cases}
\displaystyle 接線方向:\Delta v_接 =(v+\Delta v) – v≒\Delta v\\
\displaystyle 中心方向:\Delta v_心 = (v+\Delta v) \Delta\theta ≒ v\Delta\theta
\end{cases} \)
と変形することができますね。(微小量のため \(\Delta v\Delta\theta\) は無視)
ここで①式を思い出してやると、\(\vec{a}\)の接線・中心方向成分は以下のように表すことができます。
\( \begin{cases}
\displaystyle 接線方向:a_接= \displaystyle \lim_{\Delta t \to 0} \displaystyle \frac{\Delta v_接}{\Delta t} =\displaystyle \lim_{\Delta t \to 0}\frac{\Delta v}{\Delta t} = \frac{dv}{dt}\\
\displaystyle 中心方向:a_心 =\displaystyle \lim_{\Delta t \to 0} \displaystyle \frac{\Delta v_心}{\Delta t}=\displaystyle \lim_{\Delta t \to 0}\frac{v \Delta\theta}{\Delta t}=v \frac{d \theta}{dt}=v \omega
\end{cases} \)
ここで \( v=r\omega, \omega=\displaystyle\frac{d \theta}{dt} \) より、それぞれの成分の加速度は \(v\) または、\(\omega\) で表すことができます。
以上の議論から
\( \begin{cases}
\displaystyle 接線方向:a_接=\displaystyle\frac{dv}{dt}=r\displaystyle\frac{d \omega}{dt}=r\displaystyle\frac{d^2 \theta}{dt^2}\\
\displaystyle 中心方向:a_心= \displaystyle\frac{v^2}{r}=r \omega^2
\end{cases} \)
となることが分かります!
円運動における、接線・中心方向の加速度は以下のように書くことができる。
\( \begin{cases}
\displaystyle 接線方向:a_接=\displaystyle\frac{dv}{dt}=r\displaystyle\frac{d \omega}{dt}=r\displaystyle\frac{d^2 \theta}{dt^2}\\
\displaystyle 中心方向:a_心= \displaystyle\frac{v^2}{r}=r \omega^2
\end{cases} \)
これらは、円運動の運動方程式を書き下すときにすぐに出てこなければいけない式だから、必ず覚えること!
3. 円運動の運動方程式
円運動の加速度が求まったところで、いよいよ運動方程式について考えてみます。
運動方程式の基本形\(m\vec{a}=\vec{F}\)を考えていきますが、2.1.5の議論より運動方程式は接線方向と中心(向心)方向について分解すればよいとわかったので、円運動の運動方程式は以下のようになります。
運動方程式は以下のようになる。特に\(v\)を用いて記述することが多いので\(v\)を用いた形で表すと、
\[
\begin{cases}
接線方向:m\displaystyle\frac{dv}{dt}=F_接 \\
中心方向:m\displaystyle\frac{v^2}{r}(=mr\omega^2)=F_心
\end{cases}
\]
ここで中心方向の力\(F_心\)と加速度についてですが、中心に向かう向き(向心方向)を正にとることに注意してください!また、向心方向に向かう力のことを向心力、加速度のことは向心加速度といいます。
特に\(F_接 =0\)のときは
\( \displaystyle m \frac{dv}{dt} = 0 \ \ ∴\displaystyle\frac{dv}{dt}=0 \)
となり等速円運動となります。
4. 遠心力について
日常でもよく聞く「遠心力」という言葉ですが、実際の円運動においてどのような働きをしているのでしょうか?詳しく説明します!
4.1 遠心力とは
まず言葉で定義を説明すると、遠心力とは慣性系(地面に固定した座標系のこと)に対して回転している回転座標系において作用する慣性力のことです。
言葉だけではわかりづらいと思いますので、簡単な例を用いて理解していきましょう。
下図のように、円板の上に棒を立て、その棒からおもりをつるして角速度\(\omega\)で回転させた場合をイメージします。
このときのおもりの回転半径を \(r\) とします。このとき、地上の観測者A(慣性系)と回転円板上に乗っている観測者B(回転座標系)からおもりの運動がどのように見えるか考えてみましょう。
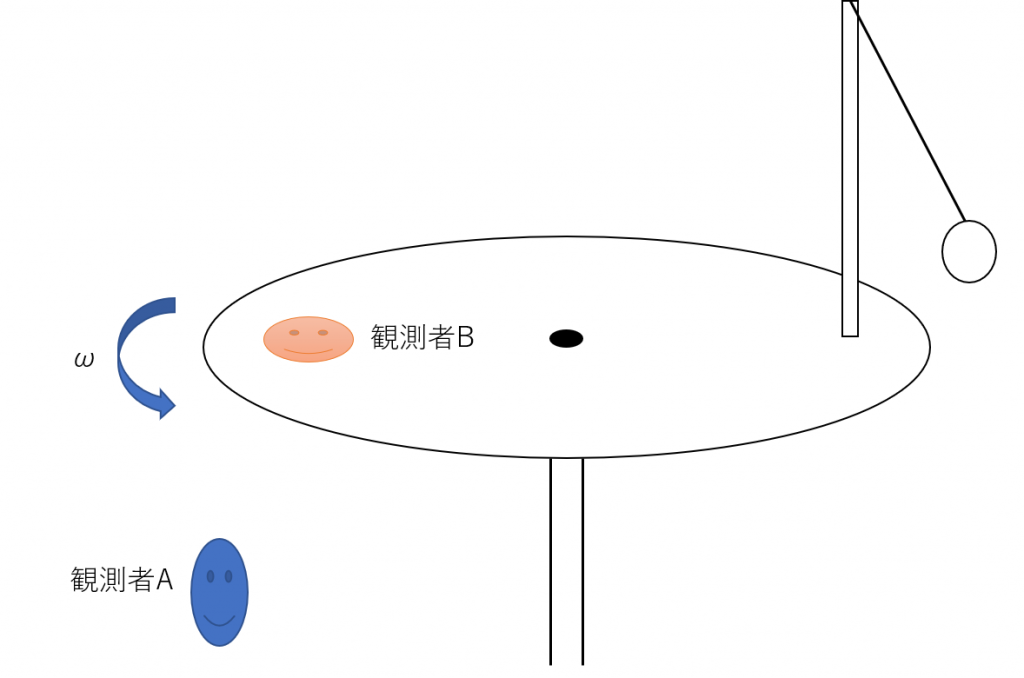
まずは観測者Aの立場(慣性系)に立ってみましょう。
観測者Aから見ると、おもりは半径rの等速円運動をしていることになり、このときおもりが受ける向心力は \(mr\omega^2\) となります(運動方程式より)。
次に円板上の観測者Bの立場(回転座標系)に立ってみます。
すると回転円板に乗っておもりを見ると、おもりは静止しています。つまりおもりにかかっている力は釣り合っているということができます。
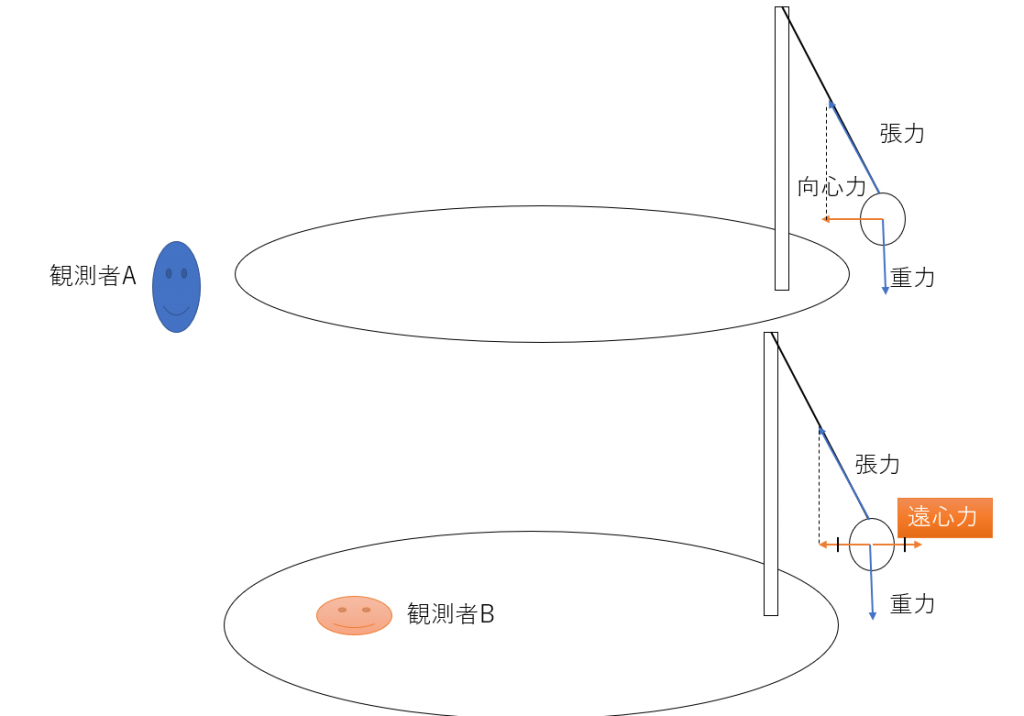
どちらの系においても糸からの張力と重力の作用は変わらないから、結局観察者Bが観察したときに、おもりが静止しているためには慣性系における向心力とは「逆向き」で「同じ大きさ」の力がかかる必要があります。
その力のことを「遠心力」といいます。
結局、遠心力\(F\)は以下のように表すことができる。
\( \displaystyle F = mr \omega^2 = m \frac{v^2}{r} \)
4.2 問題を解く上での使い方(結局いつ使うの?)
それでは遠心力が円運動の問題を解くときにどのように役に立つか見てみましょう。
先ほどの説明と少し似たモデルを考えてみましょう。
以下のモデルにおいて角速度 \(\omega\) がどのように表せるか、慣性系と回転座標系の二つの観点から考えてみます!
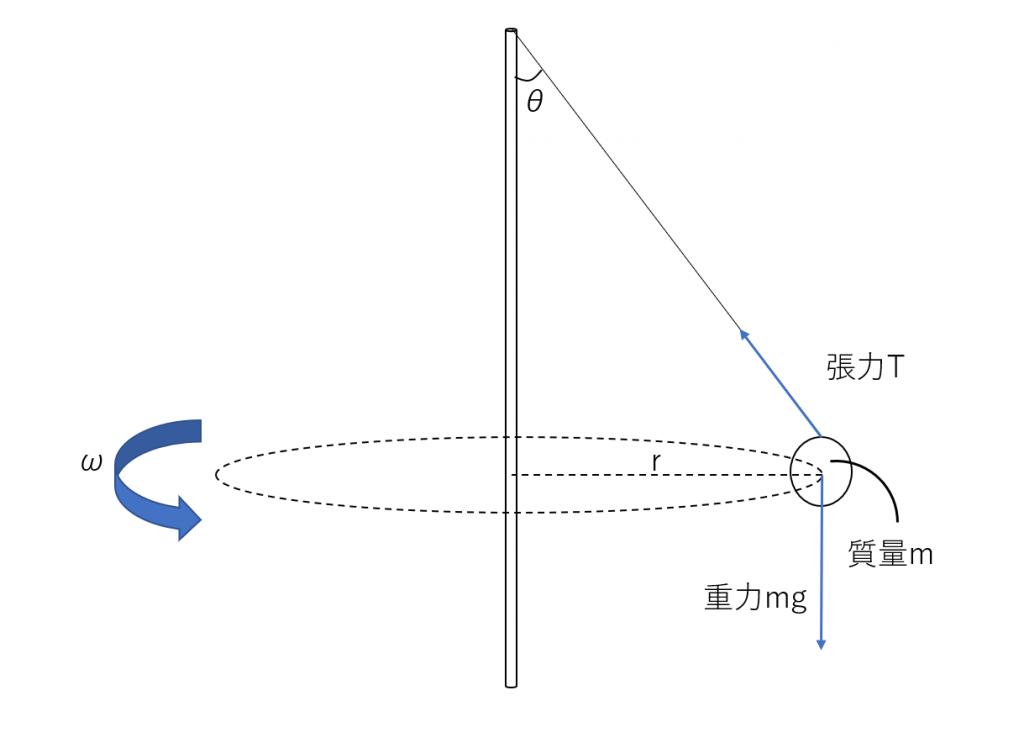
まず慣性系で考えてみます。上で考えたようにおもりは半径\(r\)の等速円運動をしているので、中心方向(向心方向)の運動方程式と鉛直方向のつり合いの式より
運動方程式:\( \displaystyle mr \omega^2 = T \sin \theta \)
鉛直方向:\( \displaystyle T \cos \theta – mg = 0 \)
\( \displaystyle ∴ \ \omega = \sqrt{\frac{g}{r}\tan\theta} \)
次に回転座標系で考えてみます。
このときおもりは静止していて、向心方向とは逆方向に大きさ\(mr\omega^2\)がかかっているから(下図参照)、水平方向と鉛直方向の力のつり合いの式より

水平方向:\( \displaystyle mr\omega^2-T\sin\theta=0 \)
鉛直方向:\( \displaystyle T\cos\theta-mg=0 \)
\( \displaystyle∴ \ \omega = \sqrt{\frac{g}{r}\tan\theta} \)
結局どの系で考えるかの違っても、最終的な式・結果は同じになります。
遠心力を用いた方が解きやすい問題もありますが、混合を防ぐために基本的には運動方程式をたてて解くのが良いです!
もし、そのような問題に出くわしたとしても、問題文に回転座標系をほのめかすような文面、例えば「~とともに動く観察者から見て」「~とともに動く座標系を用いると」などが入っていることが多いので、そういった場合にのみ回転座標系を用いるのが一番良いと思われます。
どちらにせよ問題文によって柔軟に対応できるように、どちらの考え方も身に着けておく必要があります!
5. 円運動まとめ
最後に今回学んだことをまとめておきます。復習・確認に役立ててください!
位置:極座標系で考える。中心角\(\theta\)を変数に用いるのが普通。
速度:速度は接線成分のみ。各速度\(\omega=\displaystyle\frac{d \theta}{dt}\)は速度\(v\)と一対一対応する。
加速度:中心(向心)方向と接線方向に分解できて、
\( \begin{cases}
\displaystyle 接線方向:a_接=\displaystyle\frac{dv}{dt}=r\displaystyle\frac{d \omega}{dt}=r\displaystyle\frac{d^2 \theta}{dt^2}\\
\displaystyle 中心方向:a_心= \displaystyle\frac{v^2}{r}=r \omega^2
\end{cases} \)
と表記可能。
運動方程式:接線方向と中心(向心)方向にわけて書く。とくに \(F_接=0\) のとき等速円運動。
遠心力:回転座標系を考えたときに、向心力とは逆向きに同じ大きさで働く力のこと。
以上です。お疲れさまでした!


ありがとうちゃん
v=rωの式で v[m/s] r[m]なら ω[1/s]角回転数になり ω[rad/s]角速度 にはなりません。さらにω=2πf
で fは回転数[1/s] です。この間違いが生じた原因を考えたところ 弧度法の定義があいまいだったためと推理
しました。弧度法を平面座標と極座標の2つで解説すれば、物理学でωの単位を間違うことはなかったと考えています。